SPI示例
源码路径:example\rt_device\spi
支持的平台
例程可以运行在以下开发板.
em-lb525
em-lb587
概述
在RT-Thread操作系统下,通过spi接口进行读写nor flash演示
例程的使用
编译和烧录
以em-lb525为例
此例程中用到了spi1,在采用RT-Thread操作系统时,spi1外设会虚拟成了一个rt_device来进行读写操作,此时需要确认所在路径下
rtconfig.h文件中是否包含了下面2个宏:
#define BSP_USING_SPI 1
#define BSP_USING_SPI1 1
只有包含了上面两个宏,在rt_hw_spi_bus_init函数中才会通过rt_spi_bus_register函数注册"spi1"这个rt_device,后面该设备才能rt_device_find和rt_device_open`成功。
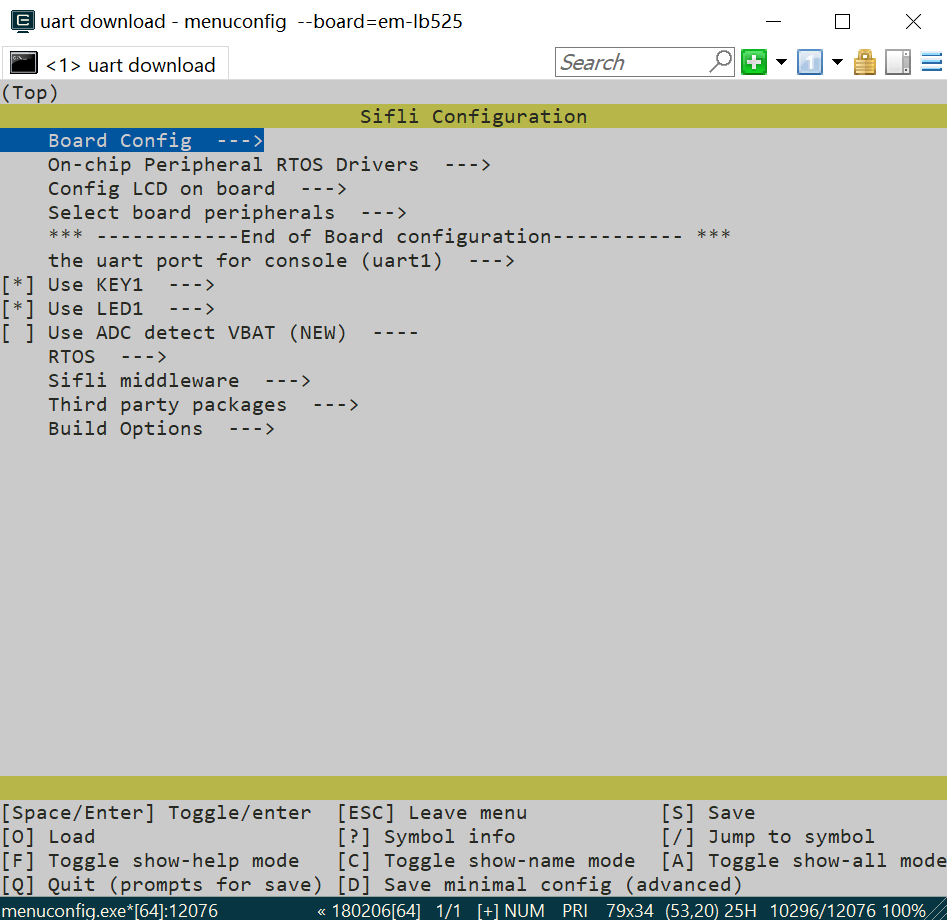
如果缺失上面三个宏,就需要通过menuconfig如下命令进行打开
menuconfig --board=em-lb525
如下图,选择spi1(需要用到DMA,选择对应DMA选项),保存并退出menuconfig,查看rtconfig.h宏是否生成
切换到例程project目录,运行scons命令执行编译:
scons --board=em-lb525 -j8
运行
build_em-lb525_hcpu\uart_download.bat,按提示选择端口即可进行下载:
build_em-lb525_hcpu\uart_download.bat
Uart Download
please input the serial port num:5
关于编译、下载的详细步骤,请参考上手指南的相关介绍。
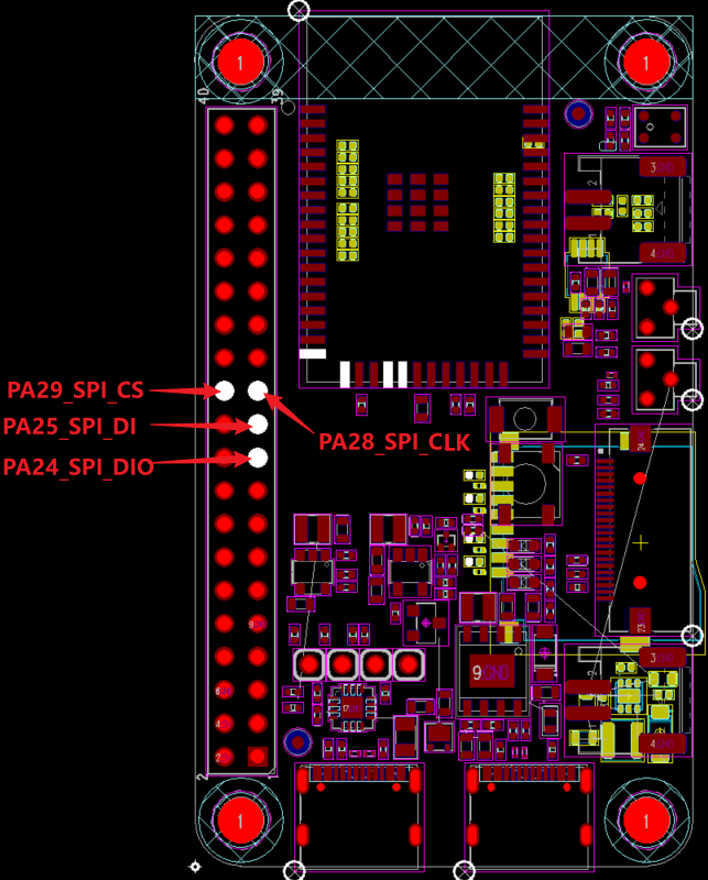
硬件连接
开发板 |
功能引脚 |
本端设备引脚 |
对端设备引脚 |
物理引脚(CONN2) |
|---|---|---|---|---|
em-lb52x |
PA_24 |
dio |
SPI_MOSI |
19 |
PA_25 |
di |
SPI_MISO |
21 |
|
PA_28 |
clk |
SPI_CLK |
23 |
|
PA_29 |
cs |
SPI_CS |
24 |
|
em-lb58x |
PA_21 |
do |
SPI_MOSI |
8 |
PA_20 |
di |
SPI_MISO |
10 |
|
PA_28 |
clk |
SPI_CLK |
5 |
|
PA_29 |
cs |
SPI_CS |
3 |
em-lb525硬件原理图参考如下图:
例程输出结果展示:
log输出:
SFBL
Serial:c2,Chip:4,Package:3,Rev:3 Reason:00000080
\ | /
- SiFli Corporation
/ | \ build on Oct 24 2024, 2.2.0 build 00000000
2020 - 2022 Copyright by SiFli team
mount /dev sucess
[32m][1920] I/drv.rtc: PSCLR=0x80000100 DivAI=128 DivAF=0 B=256
[0m][32m][1947] I/drv.rtc: RTC use LXT RTC_CR=00000001
[0m][32m][1968] I/drv.rtc: Init RTC, wake = 0
[0m][32m][2129] I/drv.audprc: init 00 ADC_PATH_CFG0 0x606
[0m][32m][2152] I/drv.audprc: HAL_AUDPRC_Init res 0
[0m][32m][2173] I/drv.audcodec: HAL_AUDCODEC_Init res 0
[0m][32m][2195] I/TOUCH: Regist touch screen driver, probe=1203bcad
[0mcall par CFG1](35bb)
fc 9, xtal 2000, pll 2052
call par CFG1(35bb)
fc 9, xtal 2000, pll 2052
Start spi demo!
msh />
[35017] D/spi1: Find spi bus spi1:20008184
[35036] D/spi1: rt_spi_configure result:0
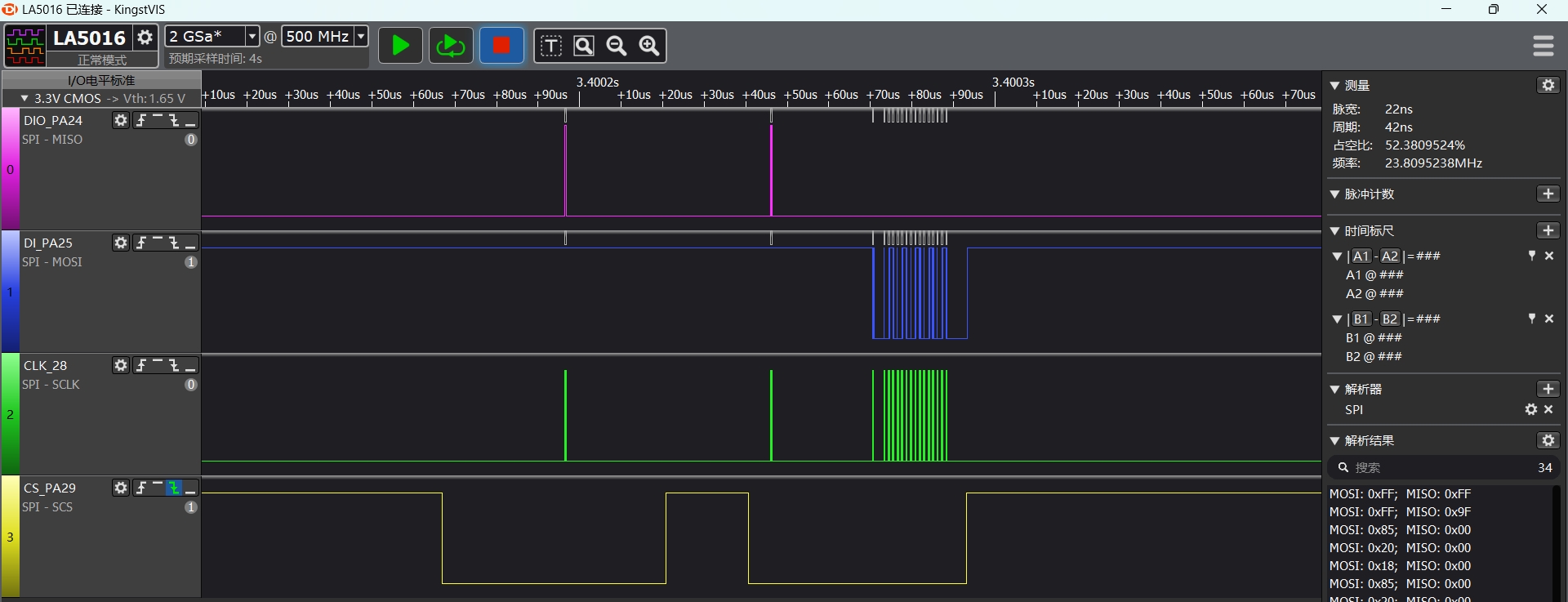
[38320] D/spi1: rt_spi_transfer recv reg:9f value:85
spi read:0x85,0x20,0x18,0x85,0x20,0x18,0x85,0x20,0x18,0x85,0x20,0x18,0x85,0x20,0x18,0x85,
[38375] D/spi1: spidev_register_write addr:0x2 value:0x33
spi demo end!
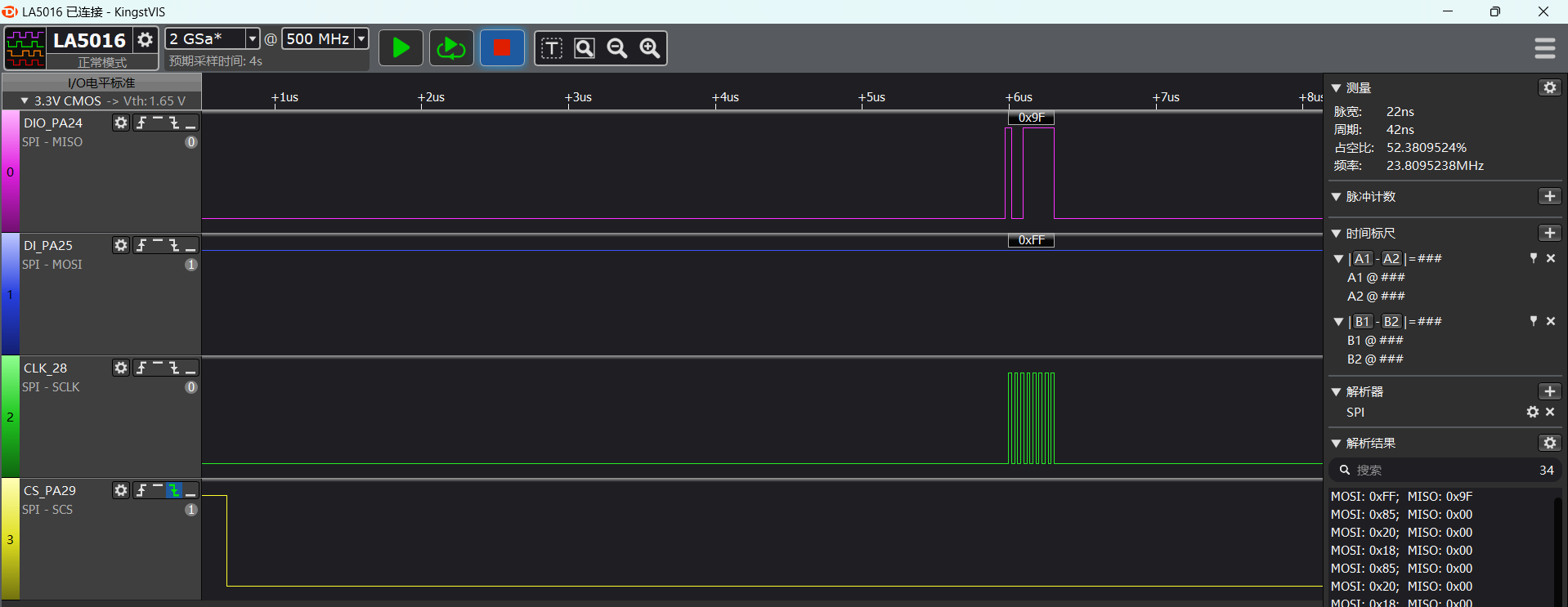
下图为其中抓取的spidev_register_read(reg,1,read_data, 16);前半部分波形:
spi1配置流程
确保
rtconfig.h文件中是否包含了下面2个宏:
#define BSP_USING_SPI 1
#define BSP_USING_SPI1 1
注意
如果使用TX DMA,则需要打开
#define BSP_SPI1_TX_USING_DMA 1;在SPI的数据量不多的情况下,采用DMA会增加代码开销,反而实时性会更低;
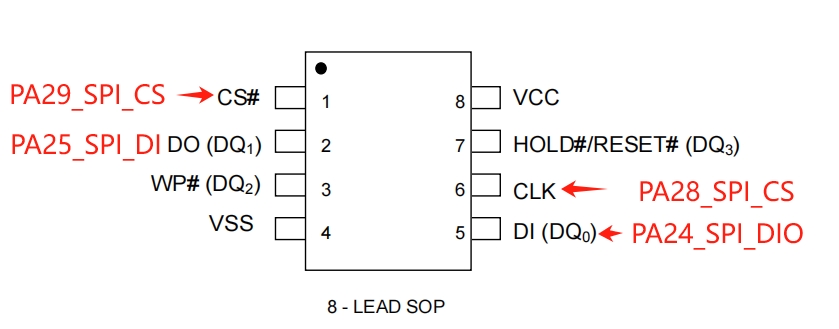
以em-lb52x开发版为例,配置对应的spi1对应的IO口
/* 1, pinmux set to spi1 mode */
HAL_PIN_Set(PAD_PA24, SPI1_DIO, PIN_PULLDOWN, 1); // SPI1 (Nor flash)
HAL_PIN_Set(PAD_PA25, SPI1_DI, PIN_PULLUP, 1);
HAL_PIN_Set(PAD_PA28, SPI1_CLK, PIN_NOPULL, 1);
HAL_PIN_Set(PAD_PA29, SPI1_CS, PIN_NOPULL, 1);
注意
CLK,CS为输出口,不需要配置为上下拉状态
DIO,DI口为输入口,需要配置上下拉,如果外设没有特别需要,采用此默认值
HAL_PIN_Set 最后一个参数为hcpu/lcpu选择, 1:选择hcpu,0:选择lcpu
Hcpu的PA口不能配置为Lcpu的spi外设,比如spi3,spi4输出
先后
rt_device_find,rt_device_control,rt_device_open分别查找、配置和打开spi设备
rt-thread为了适配不同设备采用同一个spi总线,多定义一个设备,需要通过rt_hw_spi_device_attach把
spi1设备附到该设备,此处为nor_flash
#define NOR_FLASH_DEVICE_NAME "nor_flash"
#define SPI_BUS_NAME "spi1"
static struct rt_spi_device *spi_dev_handle = {0};/* 定义spi设备的操作句柄 */
static struct rt_spi_configuration spi_dev_cfg = {0}; /* 配置spi的结构体 */
rt_err_t spi_dev_init(void)
{
rt_err_t rst = RT_EOK;
/* 1, pinmux set to spi1 mode */
#ifdef SF32LB52X
HAL_PIN_Set(PAD_PA24, SPI1_DIO, PIN_PULLDOWN, 1); // SPI1 (Nor flash)
HAL_PIN_Set(PAD_PA25, SPI1_DI, PIN_PULLUP, 1);
HAL_PIN_Set(PAD_PA28, SPI1_CLK, PIN_NOPULL, 1);
HAL_PIN_Set(PAD_PA29, SPI1_CS, PIN_NOPULL, 1);
#elif defined(SF32LB58X)
HAL_PIN_Set(PAD_PA21, SPI1_DO, PIN_PULLDOWN, 1); // SPI1 (Nor flash)
HAL_PIN_Set(PAD_PA20, SPI1_DI, PIN_PULLUP, 1);
HAL_PIN_Set(PAD_PA28, SPI1_CLK, PIN_NOPULL, 1);
HAL_PIN_Set(PAD_PA29, SPI1_CS, PIN_NOPULL, 1);
#endif
/* 2, find/open/config spi1 device */
rt_device_t spi_bus = rt_device_find(SPI_BUS_NAME);
if (spi_bus)
{
rt_device_open(spi_bus, RT_DEVICE_FLAG_RDWR);
LOG_D("Find spi bus %s:%x\n", SPI_BUS_NAME, spi_bus);
spi_dev_handle = (struct rt_spi_device *)rt_device_find(NOR_FLASH_DEVICE_NAME);
if (spi_dev_handle == NULL)
{
rst = rt_hw_spi_device_attach(SPI_BUS_NAME, NOR_FLASH_DEVICE_NAME);
spi_dev_handle = (struct rt_spi_device *)rt_device_find(NOR_FLASH_DEVICE_NAME);
if (spi_dev_handle == NULL)
{
LOG_E("Register spi_dev spi device fail\n");
return -RT_ERROR;
}
}
/* 需要使用中断或者DMA,或上对应的参数 */
rst = rt_device_open((rt_device_t)(spi_dev_handle), RT_DEVICE_FLAG_RDWR);//|RT_DEVICE_FLAG_DMA_TX);
spi_dev_cfg.data_width = 8; //bit
spi_dev_cfg.max_hz = 20 * 1000 * 1000; // hz
spi_dev_cfg.mode = RT_SPI_MODE_0 | RT_SPI_MSB | RT_SPI_MASTER;
spi_dev_cfg.frameMode = RT_SPI_MOTO; //RT_SPI_TI;
rst = rt_spi_configure(spi_dev_handle, &spi_dev_cfg);
LOG_D("rt_spi_configure result:%d", rst);
}
/* rt_pin_mode(spi_dev_CS_PIN, PIN_MODE_OUTPUT); */
/* rt_pin_write(spi_dev_CS_PIN, PIN_HIGH); */
return rst;
}
spi参数配置
/* 数据宽度,参数为8,16 对应8bit,16bit */
spi_dev_cfg.data_width = 8; //bit
/* spi的clk频率,单位为hz */
spi_dev_cfg.max_hz = 20 * 1000 * 1000; // hz
/**
RT_SPI_MODE_0:选择mode 0-3;
RT_SPI_MSB:为一个byte中bit7先发送,bit0最后发送;
RT_SPI_MASTER:spi主模式(slave模式此处没有演示)
*/
spi_dev_cfg.mode = RT_SPI_MODE_0 | RT_SPI_MSB | RT_SPI_MASTER;
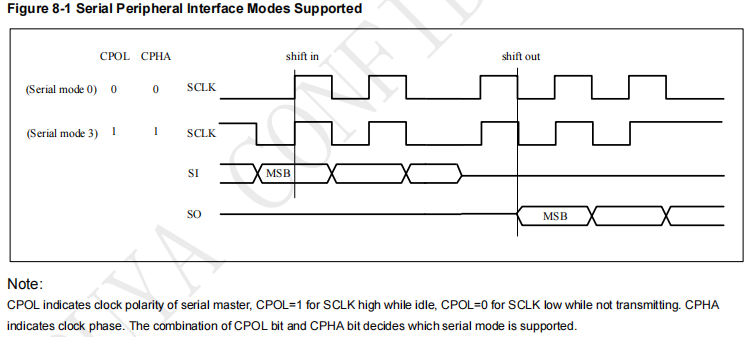
RT_SPI_MODE_0(0-3)对应下图4种spi模式,4种模式的区别在于clk空闲时候的电平状态、第一个还是第二个clk进行采样
MODE0,MODE1在clk空闲时为低电平,MODE1和MODE3为CS拉低后第二个clk上升沿采样DIO或者DI数据
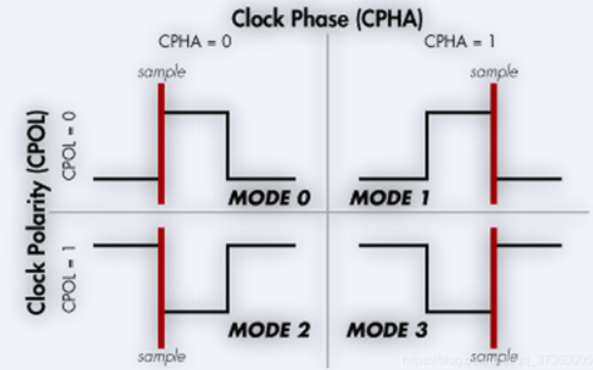
示例中采用的nor flash规格书上,标注MODE0和MODE3都支持
spi收发数据
uint8_t reg_data[] = {0x02,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xaa,0xbb,0xcc,0xdd,0xee,0xff};
uint8_t reg[2] = {0x9f,0xff};
uint8_t read_data[16] = {0};
/* 单独发送一个字节0xFF */
spidev_write(®[1],1);
/* 发送一个字节0x9f命令后,读取16个字节数据 */
spidev_register_read(reg,1,read_data, 16);
/* 打印出来读出来的数据 */
rt_kprintf("spi read:");
for(uint8_t i = 0; i < 16; i++)
{
rt_kprintf("0x%x,",read_data[i]);
}
rt_kprintf("\n");
/* 先发送3个字节后,再发送13个字节 */
spidev_register_write(reg_data,3,®_data[3],13);
打开
finsh功能后,可以log串口终端输入list_device可以查看spi1和nor_flash是否open状态,0表示设备已经注册,1,2表示设备open的次数
msh />
TX:list_device
list_device
device type ref count
-------- -------------------- ----------
nor_flas SPI Device 1
audcodec Sound Device 0
audprc Sound Device 0
rtc RTC 0
pwm3 Miscellaneous Device 0
touch Graphic Device 0
lcdlight Character Device 0
lcd Graphic Device 0
i2c4 I2C Bus 0
i2c1 I2C Bus 0
spi1 SPI Bus 1
lptim1 Timer Device 0
btim1 Timer Device 0
uart2 Character Device 0
uart1 Character Device 2
pin Miscellaneous Device 0
msh />
这里只是演示了spi作为master的一种推荐用法,其他操作方式,在rt-thread操作系统下,可以参考rt-thread官网使用手册
异常诊断
spi1无波形输出
pin status 24/25/28/29命令查看对应PA24,PA25,PA28,PA29的IO状态FUNC对不对,PA29作为CS脚应该为高电平,对应VAL=1
msh />
TX:pin status 24
pin status 24
[32m[109951461] I/TEST.GPIO: PIN 24, FUNC=2, VAL=0, DIG_IO_PD, GPIO_MODE_INPUT, irqhdr=/, arg=/
[0mmsh />
msh />
TX:pin status 25
pin status 25
[32m[110036013] I/TEST.GPIO: PIN 25, FUNC=2, VAL=1, DIG_IO_PU, GPIO_MODE_INPUT, irqhdr=/, arg=/
[0mmsh />
msh />
TX:pin status 28
pin status 28
[32m[110115999] I/TEST.GPIO: PIN 28, FUNC=2, VAL=0, DIG_IO, GPIO_MODE_INPUT, irqhdr=/, arg=/
[0mmsh />
msh />
TX:pin status 29
pin status 29
[32m[110195531] I/TEST.GPIO: PIN 29, FUNC=2, VAL=1, DIG_IO, GPIO_MODE_INPUT, irqhdr=/, arg=/
[0mmsh />
msh />
list_device命令查看spi1,nor_flash设备是不是存在并且打开了检查spi1初始化和配置流程是否都已生效
spi1波形正常,spi1的DI接收不到数据
先示波器查看波形电平是否正常
逻辑分析仪抓取时序,跟外设的规格书对比,看波形要求是否一致
检测spi1输出和外设是否连接正常
检测外设的供电是否正常
spi波形时效性不够
如下图cs信号到clk实际数据,中间延时过大,这是因为rt-thread封装后导致的延迟,如果对时效性要求高的,可以参考直接操作hal的示例
参考文档
EH-SF32LB52X_Pin_config_V1.3.0_20231110.xlsx
DS0052-SF32LB52x-芯片技术规格书 V0p3.pdf
PY25Q128HA_datasheet_V1.1.pdf
RT-Thread官网 https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/spi/spi
更新记录
版本 |
日期 |
发布说明 |
|---|---|---|
0.0.1 |
10/2024 |
初始版本 |