2. 旋转编码器使用教程
一、旋转编码器介绍
旋转编码器是一种能够将机械旋转动作转换为对应电信号的精密传感器,核心用途是测量旋转角度、旋转速度,也常在嵌入式设备中实现菜单切换、参数调节、音量控制等交互式操作。
根据输出信号的形式,旋转编码器主要分为两类:
- 绝对式编码器:输出与旋转位置一一对应的唯一编码信号,断电后不会丢失位置信息,适合高精度定位、多档位切换等场景,成本相对较高。
- 增量式编码器:输出两路相位差90°的脉冲信号,通过对脉冲进行计数可获取旋转角度,通过判断两路脉冲的相位先后可获取旋转方向,具有结构简单、成本低廉、实时性好的特点,在嵌入式系统中应用更为广泛。
二、menuconfig配置
在编写代码前,需先通过menuconfig工具开启工程的编码器驱动支持,操作步骤如下:
步骤1:准备工作
- 确保已完整搭建该工程的编译环境,且环境变量配置正常。
- 打开终端(CMD/终端工具),通过
cd命令切换到工程的project文件夹下(示例:cd /xxx/xiaozhi/project),确保终端当前工作路径为project目录。
步骤2:执行menuconfig配置命令
在终端中输入以下完整命令,回车后进入图形化配置界面:
scons --board=sf32lb52-xty-ai_hcpu --menuconfig步骤3:开启编码器相关驱动
- 进入图形化配置界面后,通过方向键↑/↓移动光标,选中
RTOS Drivers选项,按下回车键进入子菜单。 - 在
RTOS Drivers子菜单中,找到encoder(编码器驱动)选项,按下空格键勾选该选项(勾选后前方会出现*,表示已使能)。 - 保持
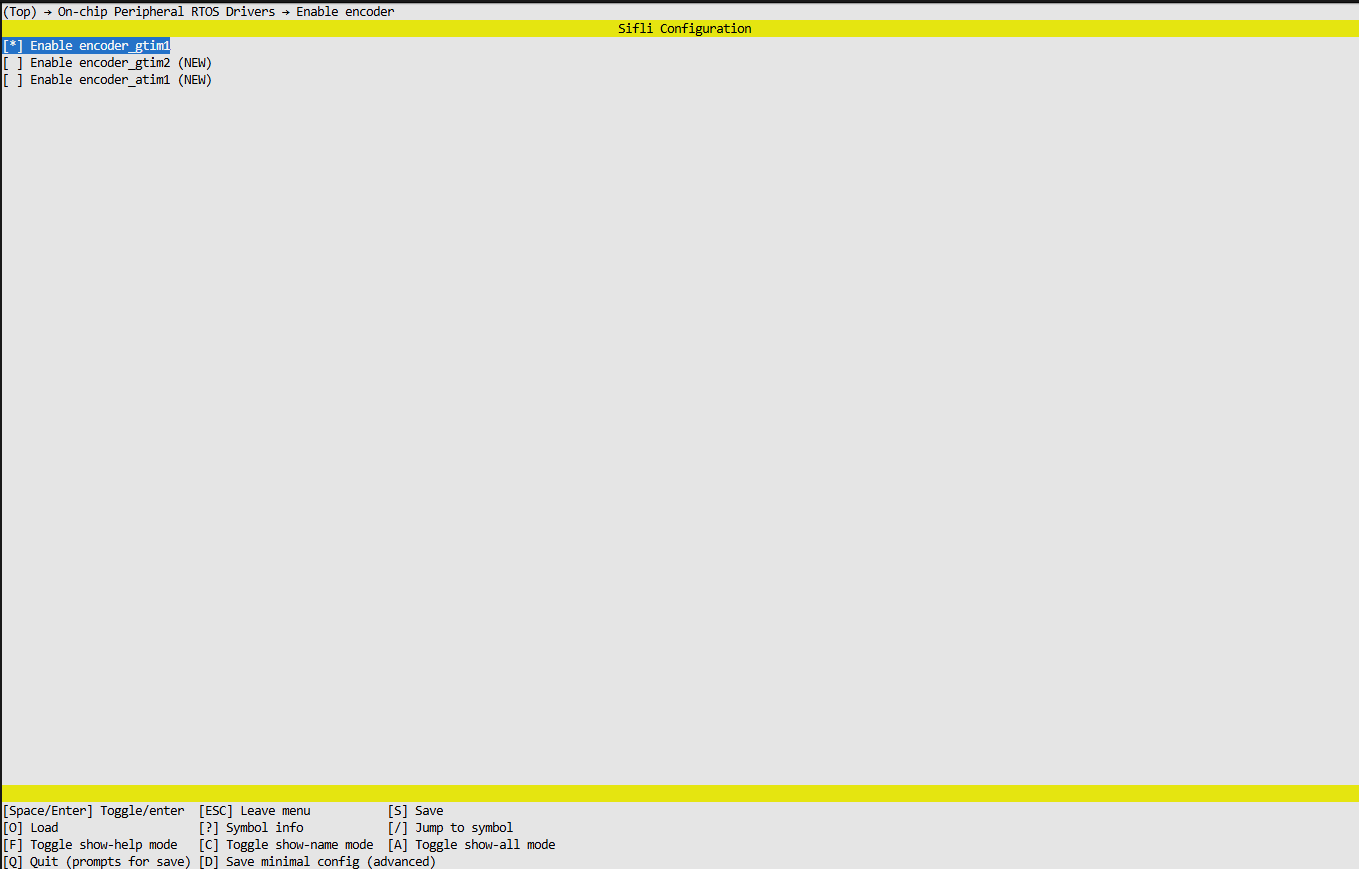
encoder选项处于选中状态,按下回车键进入编码器详细配置子菜单。 - 在详细配置子菜单中,找到
encoder_gtim1(基于GPTIM1的编码器驱动)选项,按下空格键勾选该选项,完成具体驱动通道的使能。 - 配置完成后,按下D键保存当前配置(无需修改保存路径,默认保存即可),随后多次按下Q键退出图形化配置界面,直至返回终端命令行。
三、旋转编码器代码编写
3.1 新建文件与头文件准备
编码器的代码需单独封装,便于后续维护和复用,我们将创建对应的头文件和源文件,并完成基础配置。
步骤1:创建源文件和头文件
在工程的src文件夹下,新建两个文件,文件命名和用途如下:
- 头文件:
encoder_siq.h(核心用途:定义宏常量、声明函数、声明外部全局变量,避免代码重复定义和未声明错误) - 源文件:
encoder_siq.c(核心用途:实现编码器初始化、定时器配置、计数读取等核心逻辑,是编码器功能的具体实现载体)
步骤2:编写头文件encoder_siq.h
该头文件的核心是“声明”,不做具体功能实现,完整代码和细致讲解如下:
#ifndef ENCODER_SIQ_H
#define ENCODER_SIQ_H
#include <rtthread.h>
/* 编码器设备名称定义:必须与menuconfig配置的编码器设备名称一致(此处为encoder1),
否则后续无法通过设备名称查找到编码器设备,会导致初始化失败 */
#define ENCODER_DEVICE_NAME1 "encoder1"
/* 函数声明:提前声明后续要在encoder_siq.c中实现的函数,
方便其他文件(如main.c)引入该头文件后调用对应的函数 */
rt_err_t encoder_example_init(void); // 编码器整体初始化函数(引脚、设备、定时器配置)
void Get_count(void* argv); // 定时器回调函数(周期性读取编码器计数值)
#endif /* ENCODER_SIQ_H */步骤3:引入源文件必要头文件
在encoder_siq.c文件的开头,引入实现编码器功能所需的所有头文件,确保代码中调用的接口都有对应的声明支持,完整代码如下:
#include "encoder_siq.h"
#include <rtdevice.h>
#include <drv_gpio.h>
#include <drv_encoder.h>3.2 编写编码器初始化函数
encoder_example_init函数是编码器正常工作的基础,核心完成引脚配置、周期性定时器创建、编码器设备查找、编码器设备使能四大核心功能,逐步骤细致讲解如下:
步骤1:定义全局变量
在encoder_siq.c文件中,定义全局变量,代码和说明如下:
#define ENCODER_DEVICE_NAME1 "encoder1" // 编码器设备名称(与头文件保持一致,确保设备查找匹配)
struct rt_device *encoder_device1; // 编码器设备句柄(类似设备“身份证”),后续所有对encoder1的操作都需通过该句柄实现
rt_timer_t read_counter_timer = RT_NULL; // 定时器句柄,用于管理周期性定时器,后续通过该句柄启动/停止定时器步骤2:GPIO引脚配置
根据工程原理图,旋转编码器的A相(脉冲1)对应PA38引脚,B相(脉冲2)对应PA40引脚,需将这两个引脚配置为GPTIM1的通道1和通道2,并开启上拉电阻,代码和说明如下:
// 配置编码器A、B相对应的GPIO引脚,绑定至GPTIM1对应的通道,并开启上拉电阻
HAL_PIN_Set(PAD_PA38, GPTIM1_CH1, PIN_PULLUP, 1); // A相:PA38 → GPTIM1_CH1,开启上拉电阻(使能标记为1)
HAL_PIN_Set(PAD_PA40, GPTIM1_CH2, PIN_PULLUP, 1); // B相:PA40 → GPTIM1_CH2,开启上拉电阻(使能标记为1)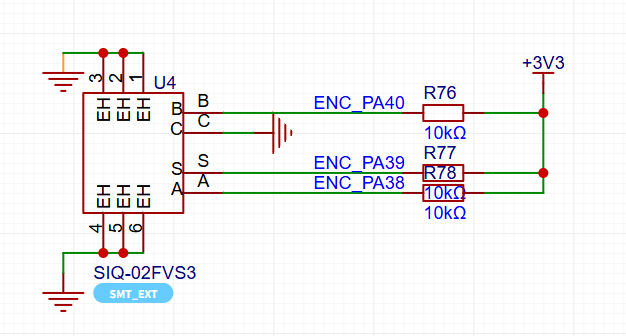
步骤3:完整初始化函数实现
在完成引脚配置和全局变量定义后,编写完整的初始化函数,每个步骤都附带明确的功能说明,代码如下:
rt_err_t encoder_example_init(void)
{
rt_err_t result1; // 用于接收各类接口调用的返回值,通过返回值判断操作是否成功(RT_EOK为成功)
// 步骤1:配置编码器A、B相GPIO引脚(绑定定时器通道+开启上拉)
HAL_PIN_Set(PAD_PA38, GPTIM1_CH1, PIN_PULLUP, 1);
HAL_PIN_Set(PAD_PA40, GPTIM1_CH2, PIN_PULLUP, 1);
// 步骤2:创建周期性定时器,用于定期读取编码器计数值
// 参数说明:
// 1. 定时器名称:read_counter_timer(自定义,便于调试识别)
// 2. 回调函数:Get_count(定时器超时后执行的函数,即计数读取函数)
// 3. 回调参数:RT_NULL(此处无需传递参数,填空)
// 4. 定时时长:1000ms(每隔1秒读取一次计数,可根据需求调整)
// 5. 定时器模式:RT_TIMER_FLAG_PERIODIC(周期性定时器,超时后自动重启,持续执行回调函数)
read_counter_timer = rt_timer_create("read_counter_timer", Get_count, RT_NULL, 1000, RT_TIMER_FLAG_PERIODIC);
// 步骤3:根据设备名称查找编码器设备,获取设备句柄
encoder_device1 = rt_device_find(ENCODER_DEVICE_NAME1);
if (encoder_device1 == RT_NULL) // 判读设备是否查找成功(句柄为NULL表示查找失败)
{
rt_kprintf("Failed to find %s device\n", ENCODER_DEVICE_NAME1); // 打印错误信息,便于调试排查
return -RT_ERROR; // 返回错误码,告知调用者初始化失败
}
// 步骤4:配置编码器参数并使能编码器设备
struct rt_encoder_configuration config1; // 编码器配置结构体,用于存储编码器的配置参数
config1.channel = GPT_CHANNEL_ALL; // 配置编码器使用所有可用通道(此处为GPTIM1_CH1和CH2,对应A、B相)
// 发送设备控制命令,使能编码器设备
// 参数说明:
// 1. 设备句柄:encoder_device1(已获取的编码器设备句柄)
// 2. 控制命令:PULSE_ENCODER_CMD_ENABLE(编码器驱动预定义,用于使能编码器设备)
// 3. 配置参数:&config1(编码器配置结构体地址,传递配置参数)
result1 = rt_device_control((struct rt_device *)encoder_device1, PULSE_ENCODER_CMD_ENABLE, (void *)&config1);
if (result1 != RT_EOK) // 判断编码器是否使能成功(RT_EOK表示成功,非0表示失败)
{
rt_kprintf("Failed to enable encoder\n"); // 打印错误信息,便于调试排查
return -RT_ERROR; // 返回错误码,告知调用者初始化失败
}
// 步骤5:打印初始化成功信息,并启动周期性定时器
rt_kprintf("Encoder devices initialized successfully\n");
rt_timer_start(read_counter_timer); // 启动定时器,开始周期性执行Get_count回调函数
return RT_EOK; // 返回成功码,告知调用者编码器初始化完成且正常
}3.3 编写定时器回调函数Get_count
Get_count是定时器的超时回调函数,会按照定时器设定的时长(1000ms)周期性执行,核心功能是读取编码器当前累计计数值,并进行错误处理和计数打印,完整代码和细致讲解如下:
void Get_count(void*argv)
{
// 1. 定义变量
static int last_count1 = 0; // 静态局部变量:仅第一次执行函数时初始化为0,后续保留上一次的赋值结果(预留用于判断旋转方向/增量)
int count1 = 0; // 普通局部变量:临时存储当前计数值(预留用于后续计数处理,如范围限制、增量计算)
rt_err_t result1; // 错误状态变量:接收设备控制接口返回值,判断计数读取是否成功
struct rt_encoder_configuration config_count1; // 编码器配置/数据回传结构体:用于接收读取到的计数值
config_count1.get_count = 0; // 初始化计数值存储成员:避免结构体成员携带脏数据(内存残留随机值),保证计数读取准确性
// 2. 核心操作:读取编码器当前累计计数值
// 参数说明与初始化函数一致,仅控制命令改为PULSE_ENCODER_CMD_GET_COUNT(用于读取计数值)
result1 = rt_device_control((struct rt_device *)encoder_device1, PULSE_ENCODER_CMD_GET_COUNT, (void *)&config_count1);
// 3. 结果处理:判断读取成败并输出对应信息
if (result1 != RT_EOK)
{
// 读取失败:打印错误提示,便于排查问题(如设备未使能、句柄无效等)
rt_kprintf("Failed to get encoder count\n");
}
else{
// 读取成功:打印当前累计计数值,config_count1.get_count中存储了有效计数结果
// 旋转方向说明:顺时针旋转,计数值递增;逆时针旋转,计数值递减
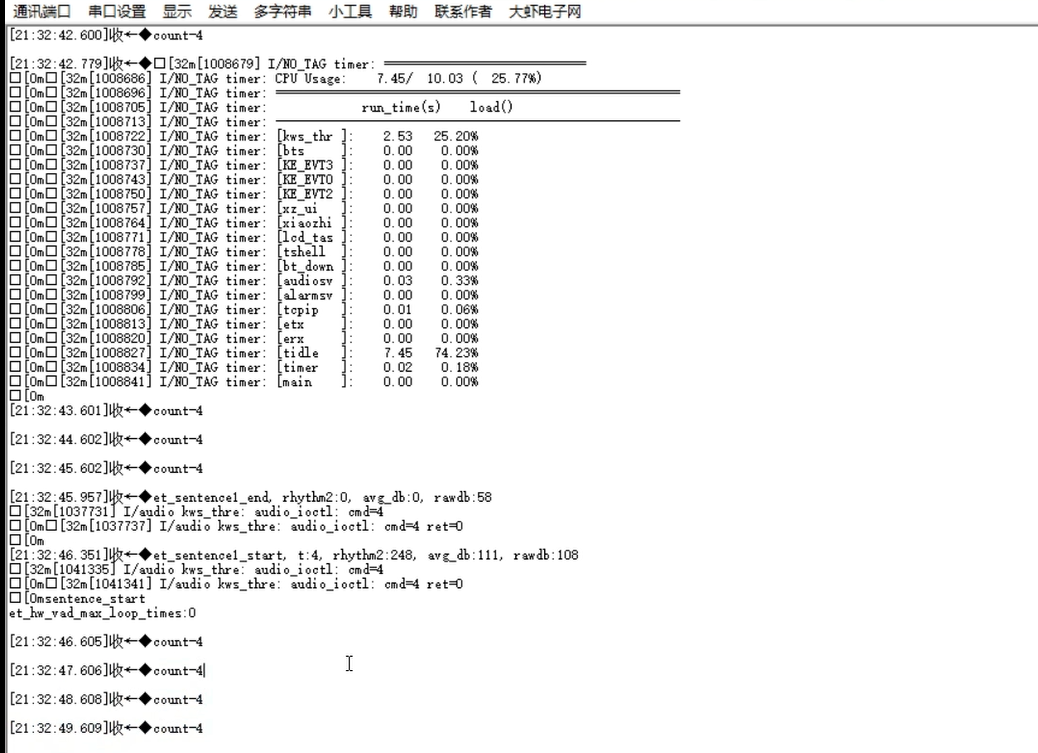
rt_kprintf("Count:%d\n", config_count1.get_count);
}
}四、编译下载与效果验证
完成代码编写后,需通过编译、烧录、串口查看三个步骤验证编码器功能是否正常,具体操作如下:
打开工程的
main.c文件,在文件开头引入编码器头文件,获取初始化函数声明:#include "encoder_siq.h" // 引入编码器头文件在
main函数中,调用encoder_example_init函数,完成编码器初始化(建议放在main函数开头,系统启动后即初始化):int main(void) { // 其他初始化代码... // 调用编码器初始化函数 encoder_example_init(); // 其他代码... while(1) { } }到这里即可将工程编译下载到开发板查看效果。