Low Power 应用指南¶
1. Low Power 概述¶
本文基于SDK低功耗使用指南,聚焦实际项目中的低功耗分析与优化,涵盖工具选型、漏电模型、待机功耗、关机功耗、Sensor 优化五大核心模块,提供可落地的分析方法与配置方案。
2. Low Power 分析准备¶
2.1 测量工具及对比¶
工具型号 |
核心优势 |
劣势 |
适用场景 |
|---|---|---|---|
PPK2 |
支持 μA 级测量; 含电源/电流计双模式; 便携小巧; 支持 IO 电平反转 |
不支持电压+电流同步测量; 单次测量≤500ms |
移动场景、短时间 μA 级功耗测试 |
KeySight 34465A |
支持 μA 级测量; 电压+电流同步测量; 测量时间无限制 |
体积大、便携性差; 仅电流计功能(需额外供电); 无 IO 电平反转 |
实验室固定场景、长时间功耗监测 |
EMK850x |
支持 μA 级测量; 测量时间无限制 |
不支持电压+电流同步测量; 无 IO 电平反转 |
实验室固定场景、长时间 μA 级测试 |
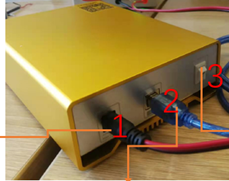
PPK2实物外形:

34465A实物外形:

EMK850x实物外形:
2.2 低功耗模式与平台适配¶
2.2.1 基础低功耗模式(SDK 定义)¶
模式名称 |
功耗等级 |
核心特性 |
|---|---|---|
|
最高 |
轻度睡眠,外设基本保持工作 |
|
中高 |
中度睡眠,部分外设暂停 |
|
中低 |
深度睡眠,多数外设关闭 |
|
较低 |
待机模式,仅保留核心唤醒电路 |
2.2.2 关机超低功耗模式¶
Shutdown 模式:完全关机,仅保留唤醒电路,功耗最低。
Hibernate 模式:深度休眠,仅保留唤醒源与最小供电,唤醒后需重新初始化外设,功耗次之;
Standby 模式:待机模式,仅保留核心唤醒电路,唤醒后需重新初始化外设,功耗稍高。
2.2.3 平台模式适配表¶
平台 |
HCPU 睡眠模式 |
LCPU 睡眠模式 |
关机模式 |
特殊说明 |
|---|---|---|---|---|
56x |
Standby |
Standby |
Standby |
关机时关闭外设供电,依赖 PM_SLEEP_MODE_STANDBY 实现低功耗 |
52x |
Deepsleep |
- |
Hibernate |
关机依赖 Hibernate 模式,唤醒后需重初始化 |
55x/58x |
Standby |
Standby |
Hibernate |
关机依赖 Hibernate 模式,唤醒后需重初始化 |
2.3 漏电模型(核心原理)¶
2.3.1 标准 PAD 模型(基础)¶
标准PAD模型
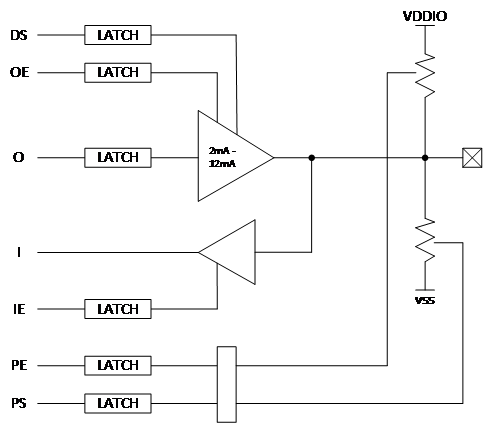
PAD 控制信号包括以下几种:
DS (Driving Strength): 驱动强度
OE (Output Enable): 输出使能
O (Output): 输出(信号)
I (Input): 输入(信号)
IE (Input Enable): 输入使能
PE (Pull Enable): 上下拉使能
PS (Pull Select): 上下拉选择
这些信号通过组合控制可实现推挽输出、开漏输出等功能。配置不当可能导致漏电。。
2.3.2 三种典型漏电模型¶
模型 1¶
配置条件:
OE=1(输出使能)
O=1(输出高)
PE=1(上下拉使能)
PS=0(下拉)
漏电原理:高电平输出与下拉电阻形成回路
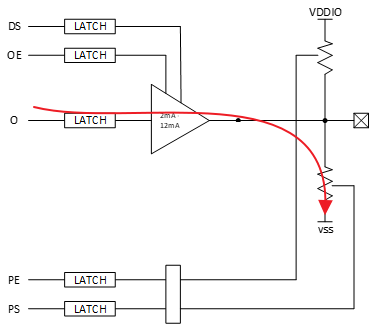
电流计算公式:I = Vo/Rpd(Rpd:下拉电阻)
错误配置示例:
// PA31 输出高+下拉
HAL_PIN_Set(PAD_PA31, GPIO_A31, PIN_PULLDOWN, 1);
BSP_GPIO_Set(31, 1, 1);
修正方案
// 改为无上下拉
HAL_PIN_Set(PAD_PA31, GPIO_A31, PIN_NOPULL, 1);
BSP_GPIO_Set(31, 1, 1);
模型 2¶
配置条件:
OE=1(输出使能)
O=0(输出低)
PE=1(上下拉使能)
PS=1(上拉)
漏电原理:低电平输出与上拉电阻形成回路
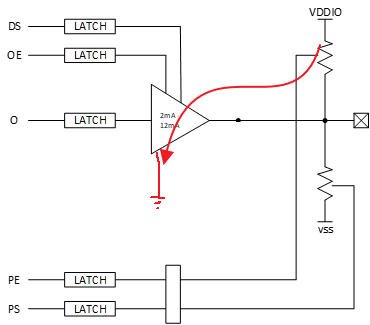
电流计算公式:I = VDDIO/Rpu(Rpu:上拉电阻)
错误配置示例:
// PA31 输出低+上拉
HAL_PIN_Set(PAD_PA31, GPIO_A31, PIN_PULLUP, 1);
BSP_GPIO_Set(31, 0, 1);
修正方案
// 改为无上下拉
HAL_PIN_Set(PAD_PA31, GPIO_A31, PIN_NOPULL, 1);
BSP_GPIO_Set(31, 0, 1);
模型 3¶
配置条件:
IE=1(输入使能)
OE=0(输出关闭)
PE=0(无上下拉)
IO 浮空
漏电原理:IO 电平处于 0~VDDIO 之间,导致输入单元 NMOS/PMOS 半导通
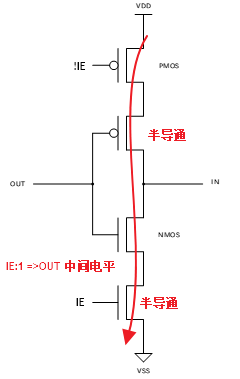
电流计算公式:I = VDD/(Rnmos+Rpmos)
错误配置示例:
// PA31 无上下拉+浮空
HAL_PIN_Set(PAD_PA31, GPIO_A31, PIN_NOPULL, 1);
// 未调用 BSP_GPIO_Set 或 rt_pin_write 设置固定电平
分析
PA31 配置为nopull,没有上拉也没有下拉,没有调用BSP_GPIO_Set或者 rt_pin_write输出高或低电, IO外部处于浮空状态,没有对应的上下拉固定电平,电平有可能处于0和VDDIO之间,就会导致漏电,漏电大小取决半导通状态的阻抗
修正方案
// 改为无上下拉
HAL_PIN_Set(PAD_PA31, GPIO_A31, PIN_NOPULL, 1);
BSP_GPIO_Set(31, 0, 1);
3. 漏电分析与 IO 正确配置¶
3.1 待机时 IO 正确配置规范¶
待机状态下,IO需通过合理配置避免漏电,以下为4种核心正确配置场景,覆盖不同使用需求:
配置场景 |
适用场景 |
配置示例 |
|---|---|---|
场景 1:IO 为 NC |
未初始化的闲置 IO |
无需额外配置(默认自带上下拉,避免浮空) |
场景 2:IO 作为输出口 |
需输出高/低电平 |
// 无上下拉+输出低 |
场景 3:IO 作为输入口 |
外部有上下拉或外设固定电平 |
// 无上下拉(依赖外部电平) |
场景 4:IO 作为输入口 |
外部无上下拉,电平不确定 |
// 内部上拉固定电平 |
具体介绍如下:
3.1 正确配置1:IO口为NC(未使用)¶
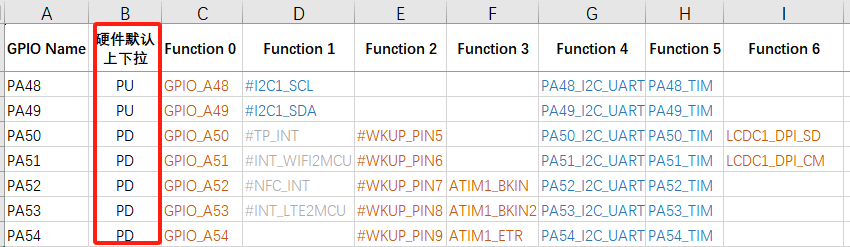
适用场景:整机中未启用、无任何功能关联的闲置IO(如预留但未焊接外设的引脚)。
配置逻辑:无需初始化,芯片默认会为未配置IO加载内置上下拉(避免浮空漏电)。
默认状态参考:
3.2 正确配置2:IO作为输出口(输出高/低电平)¶
适用场景:IO需主动输出高电平或低电平以控制外设(如LCD电源使能、LED驱动等)。
配置原则:输出口禁止配置上下拉(避免与输出电平冲突产生漏电流),统一使用 PIN_NOPULL(无上下拉)模式,再通过接口控制输出电平。
配置代码示例:
// 1. 配置PA31:无上下拉(PIN_NOPULL),使能输出功能(第4个参数1=输出使能) HAL_PIN_Set(PAD_PA31, GPIO_A31, PIN_NOPULL, 1); // 2. 控制PA31输出低电平(LCD_VCC_EN为PA31功能别名,第2个参数0=低电平,1=输出使能) BSP_GPIO_Set(LCD_VCC_EN, 0, 1);
3.3 正确配置3:IO作为输入口(外部有稳定电平)¶
适用场景:IO 作为输入,且外部存在硬件上下拉电阻,或连接的外设能持续提供稳定电平(如 UART 的 TX/RX 引脚、传感器数据输出引脚、按键固定电平引脚等)。
配置原则:根据外部电路状态选择配置,避免内部上下拉与外部电平冲突:
若外部已有上下拉电阻:IO 配置为 PIN_NOPULL(避免双重上下拉导致电流损耗);
若外部电平稳定(无上下拉但外设输出固定):可配置为 PIN_PULLUP(增强高电平稳定性)或 PIN_NOPULL。
配置代码示例:
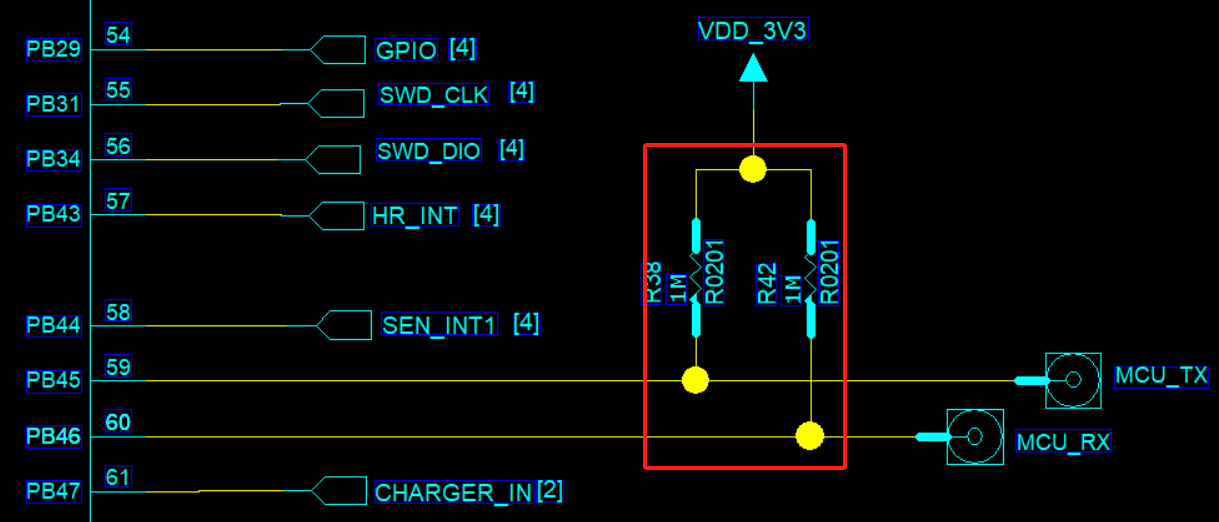
示例1:外部已有上下拉,IO配置为无上下拉// USART3_TX(PB45)、USART3_RX(PB46)作为输入,外部已有上下拉,配置为无内部上下拉 HAL_PIN_Set(PAD_PB45, USART3_TXD, PIN_NOPULL, 0); // 第4个参数0表示使能输入功能 HAL_PIN_Set(PAD_PB46, USART3_RXD, PIN_NOPULL, 0);
示例2:外部无上拉,IO 配置为内部上拉(补充稳定电平)
// USART3_TX、USART3_RX配置为内部上拉,使能输入功能 HAL_PIN_Set(PAD_PB45, USART3_TXD, PIN_PULLUP, 0); HAL_PIN_Set(PAD_PB46, USART3_RXD, PIN_PULLUP, 0);
外部上拉电路参考:
3.4 正确配置 4:IO 作为输入口(外部无稳定电平)¶
适用场景:IO 作为输入,但外部无上下拉电阻,且连接的外设无法提供稳定电平(如悬空的预留输入引脚、未接外设的传感器接口引脚等)。
配置原则:需通过内部配置固定电平,避免浮空漏电,需区分普通 IO 与唤醒源 IO:
普通 IO(非唤醒源):可选择 “内部上拉 / 下拉” 或 “高阻态”;
唤醒源 IO:仅可配置 “内部上拉 / 下拉”(禁止高阻态,存在漏电风险)。
配置代码示例:
示例 1:普通 IO 配置为内部上拉 / 下拉// 非唤醒源IO(PB45、PB46)配置为内部上拉 HAL_PIN_Set(PAD_PB45, USART3_TXD, PIN_PULLUP, 0); HAL_PIN_Set(PAD_PB46, USART3_RXD, PIN_PULLUP, 0); // 或配置为内部下拉(根据实际需求选择) HAL_PIN_Set(PAD_PB45, USART3_TXD, PIN_PULLDOWN, 0); HAL_PIN_Set(PAD_PB46, USART3_RXD, PIN_PULLDOWN, 0);
示例2:示例 2:普通 IO 配置为高阻态(仅非唤醒源可用)
// 非唤醒源IO设置为高阻态(模拟输入模式,无电流通路) HAL_PIN_Set_Analog(PAD_PB45, 0); HAL_PIN_Set_Analog(PAD_PB46, 0);
唤醒源 IO 特殊说明:
唤醒源 IO 因硬件设计特性,需与普通 IO 区分配置,核心注意事项如下:禁止高阻态的原因:
带唤醒功能的 IO 内置独立“唤醒输入通道”,即使主 IO 配置为高阻态,该唤醒通道仍需维持稳定电平;若电平悬空(高阻态),会符合“漏电模型3”(电平波动导致 NMOS/PMOS 半导通),产生 0~200uA 不等的漏电。因此必须通过内部或外部上下拉固定电平,杜绝悬空。各平台唤醒源 IO 范围:
52x 平台:PA28 ~ PA44(连续引脚段,覆盖主流唤醒场景)
56x 平台:PA50 ~ PA54、PB32 ~ PB36、PBR0 ~ PBR3(多组离散引脚,适配不同硬件布局)
唤醒源 IO 配置示例:
若外部无上下拉,配置为内部上拉(固定高电平):
// 场景:52x 平台唤醒 IO PA30(外部无上下拉),配置内部上拉固定电平 // 参数说明:PAD_PA30=引脚标识,WAKEUP_IO=唤醒功能别名,PIN_PULLUP=内部上拉,0=使能输入功能 HAL_PIN_Set(PAD_PA30, WAKEUP_IO, PIN_PULLUP, 0);
若外部已有下拉电阻(固定低电平),则需匹配配置为内部下拉:
// 外部为低电平,配置内部下拉避免冲突 HAL_PIN_Set(PAD_PA30, WAKEUP_IO, PIN_PULLDOWN, 0);
特殊说明:唤醒源 IO
定义:可触发系统唤醒的 IO(如 52x 的 PA28~PA44,56x 的 PA50~PA54);
限制:不能配置为高阻态(唤醒输入通道存在漏电风险),必须通过内部/外部上下拉固定电平。
3.2 漏电分析方法(实操)¶
方法 1:pin status 命令¶
操作步骤:
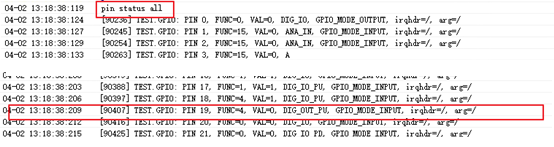
执行
pin status all查看所有 IO 配置检查“上下拉配置”与“实际电平”是否冲突(如模型 1/2)
如下图中,pin19 配置为上拉,实际电平却为低,则会通过上拉电阻漏电,参考《漏电模型2》
适用场景:快速定位配置冲突类漏电(如“上拉+低电平”)
优势:无需debug,直接查看配置
方法 2:Ozone 寄存器调试¶
操作步骤:
通过 Ozone 连接设备,手动修改 IO 寄存器为高阻
观察电流变化,定位漏电源
下图中记录了电流波形对应的电平翻转情况,以此分析对应的代码执行电流是否符合预期。
适用场景:不确定漏电源的场景
优势:精准定位单个 IO 漏电
方法 3:代码执行时间分析¶
操作步骤:
代码中增加 tick 打印或 IO 电平翻转
结合 PPK2 观察电流波形与代码执行的关联
适用场景:代码逻辑导致的异常功耗(如循环未休眠)
优势:区分“硬件漏电”与“软件逻辑功耗”
3.3 典型漏电案例(避坑指南)¶
案例 1:ADC pin 配置错误¶
漏电场景:ADC 功能未启用,但 pinmux 配置为 ADC 模式
原理图:
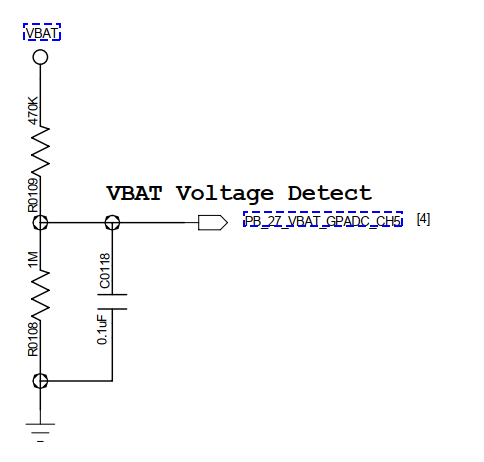
根本原因:未使用的 ADC 引脚仍保持模拟输入模式,导致漏电
解决方案:用宏包裹 ADC 配置,未启用时设为普通 IO:
#ifdef BSP_USING_ADC1 HAL_PIN_Set_Analog(PAD_PA32, 1); #else HAL_PIN_Set(PAD_PA32, GPIO_A32, PIN_NOPULL, 1); #endif
案例 2:下拉电阻阻值过小¶
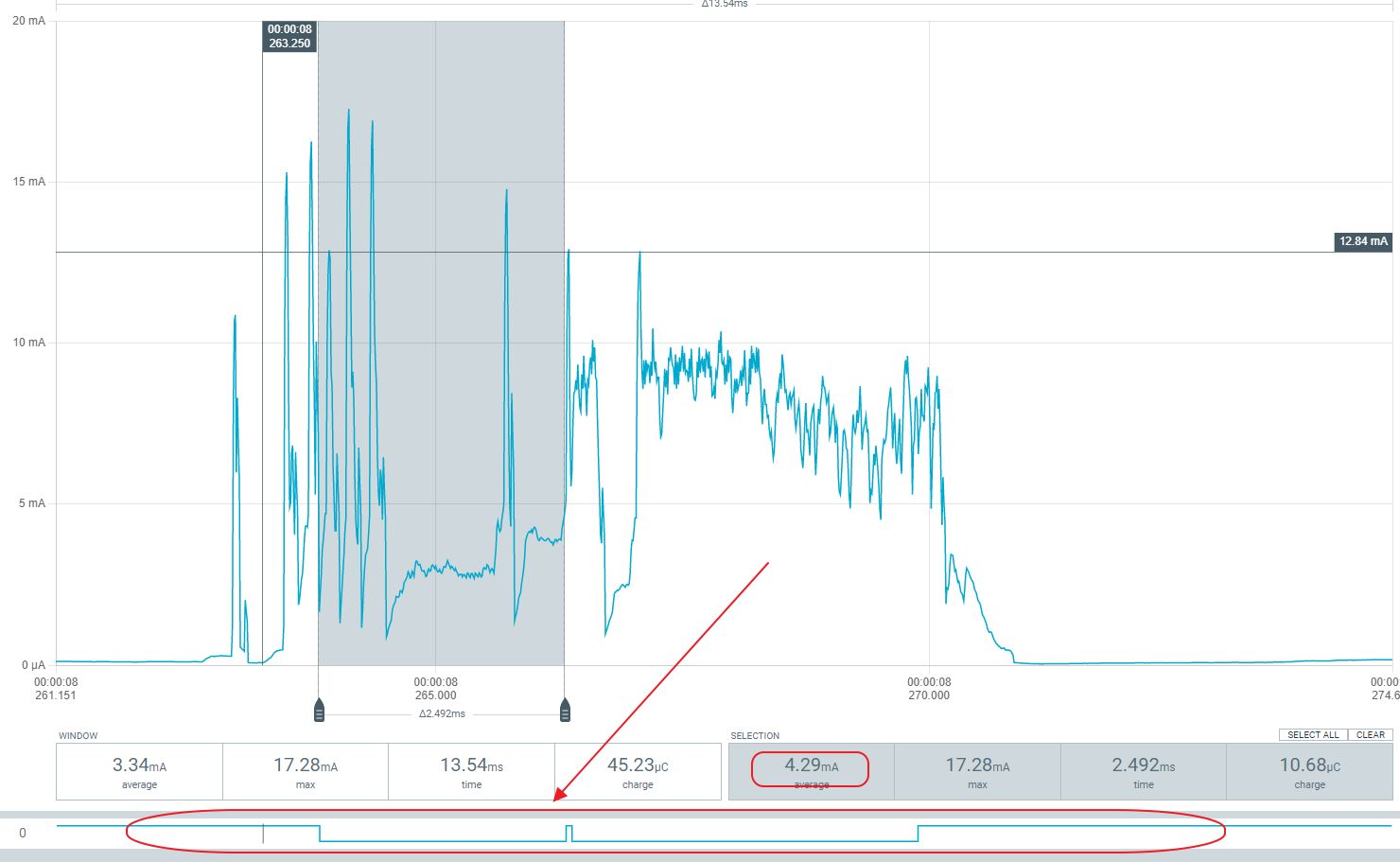
漏电场景:Audio 使能 pin 下拉电阻 10kΩ,输出高电平时漏电 180μA
原理图:
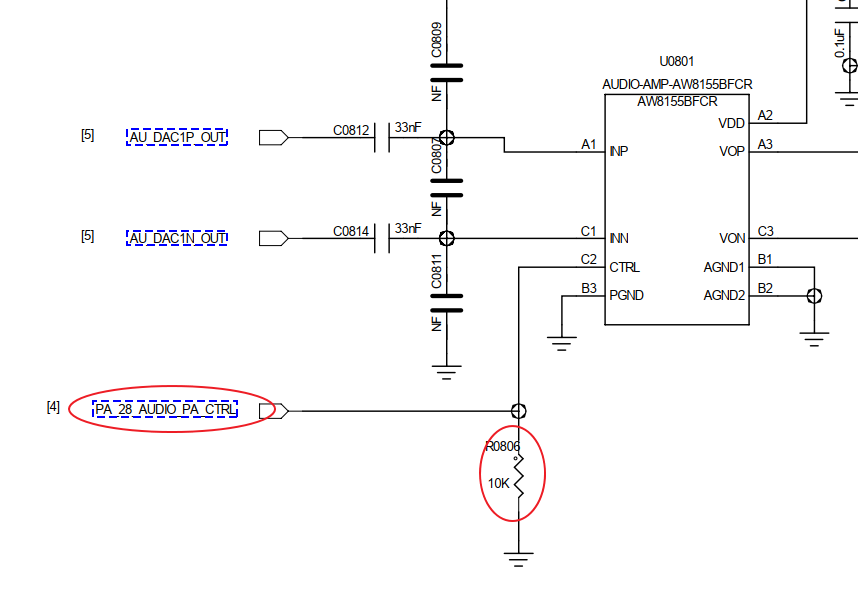
根本原因:下拉电阻阻值过小,导致高电平输出时回路电流过大
当PA_28_AUDIO_PA_CTRL的置高时,由于下拉电阻只有10k,导致漏电发生。
漏电电流大致:1.8v/10k = 180uA电流。解决方案:更换为 1MΩ 电阻,漏电降至 1.8μA
案例 3:多外设共享 IO 上电时序错误¶
漏电场景:PB23 同时控制电源芯片、Gsensor、心率传感器,供电不同步导致漏电
原理图:

根本原因:外设上电时序不一致,部分设备未供电时 IO 电平冲突
解决方案:确保 3 个外设同时供电,且 I2C 上拉供电正常
案例 4:中断触发方式与上下拉不匹配¶
漏电场景:上升沿触发中断,但 IO 配置为下拉(模型 2 漏电)
根本原因:中断触发边沿与上下拉配置冲突,形成持续漏电回路
解决方案:
上升沿触发→配置上拉/无外部上拉
下降沿触发→配置下拉/无外部下拉
案例 5:心率传感器掉电后 IO 配置未更新¶
漏电场景:VC32S 掉电后,reset pin 仍保持高电平,导致向器件漏电
原理图:
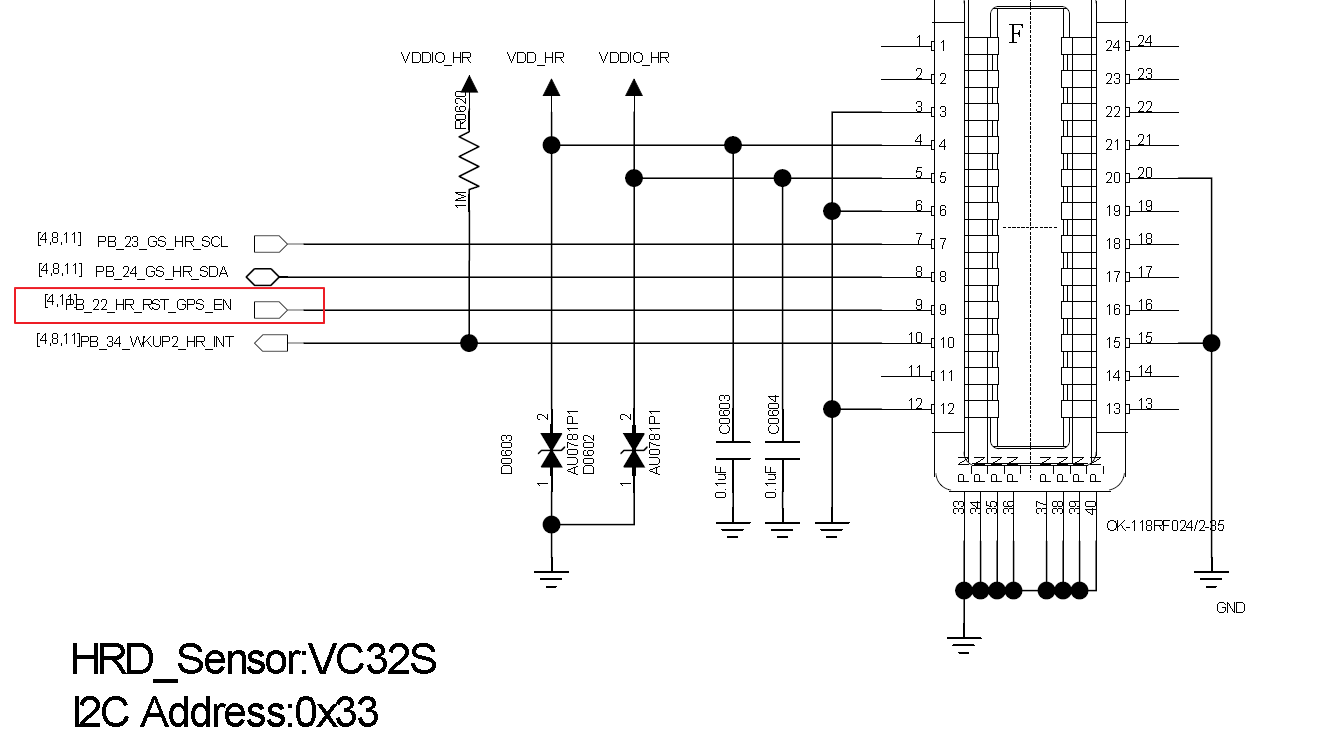
根本原因:
外设掉电后 IO 仍维持高电平,通过内部电路形成漏电路径
vc32s 驱动关闭后但供电不关闭,reset pin继续保持为高,也不会漏电;
但当vc32s 驱动关闭后但供电也关闭的时候,reset pin继续保持为高,就会造成大漏电
解决方案:掉电时将 reset pin 配置为低电平或高阻,上电后恢复高电平
4.待机低功耗分析与优化¶
4.1 低功耗配置策略¶
HCPU的频率配置
配置项 |
CPU主频 |
|---|---|
亮屏 |
240MHz |
息屏,CPU工作 |
48MHz |
CPU idle |
55x/56x/58x:1MHz,52x:4MHz |
睡眠 |
OFF。RTC选择32KHz(外部) or RC10KHz(内部) |
配置策略
配置项 |
优化目标 |
配置方法 |
|---|---|---|
idle时自动降频 |
idle时自动降低 CPU 频率 |
menuconfig启用“自动降频”,5x/56x/58x上是1MHz,52x是4MHz |
LCD关闭时频率调整 |
降低CPU 频率 |
|
睡眠时钟源选择 |
避免 RC10K 周期性校准功耗 |
优先使用外置 32K 晶振(menuconfig 中取消“使用 RC10K”选项) |
Flash 待机配置 |
待机时让 Flash 进入睡眠模式 |
- 在 |
PSRAM 待机配置 |
待机时让 PSRAM 进入半睡眠模式 |
- 在 |
4.1.1 idle时自动降频的配置¶
自动降频功能是指CPU空闲时自动降低频率,忙碌时恢复高频,以此降低功耗。 menuconfig配置如下:

4.1.2 LCD关闭时频率调整¶
CPU运行且LCD关闭状态下,MCU 会自动切换频率降低功耗。具体运行频率可通过以下方式修改:
4.1.3 RC10K / 外置 32K 的配置¶
RC10K:内部时钟,需周期性校准,会增加功耗;
外置 32K:依赖外部晶振,可减少功耗,但需额外硬件成本。
menuconfig配置如下:
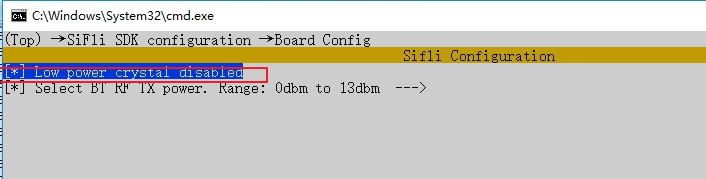
(选中表示使用 RC10K,未选中表示使用外置 32K)
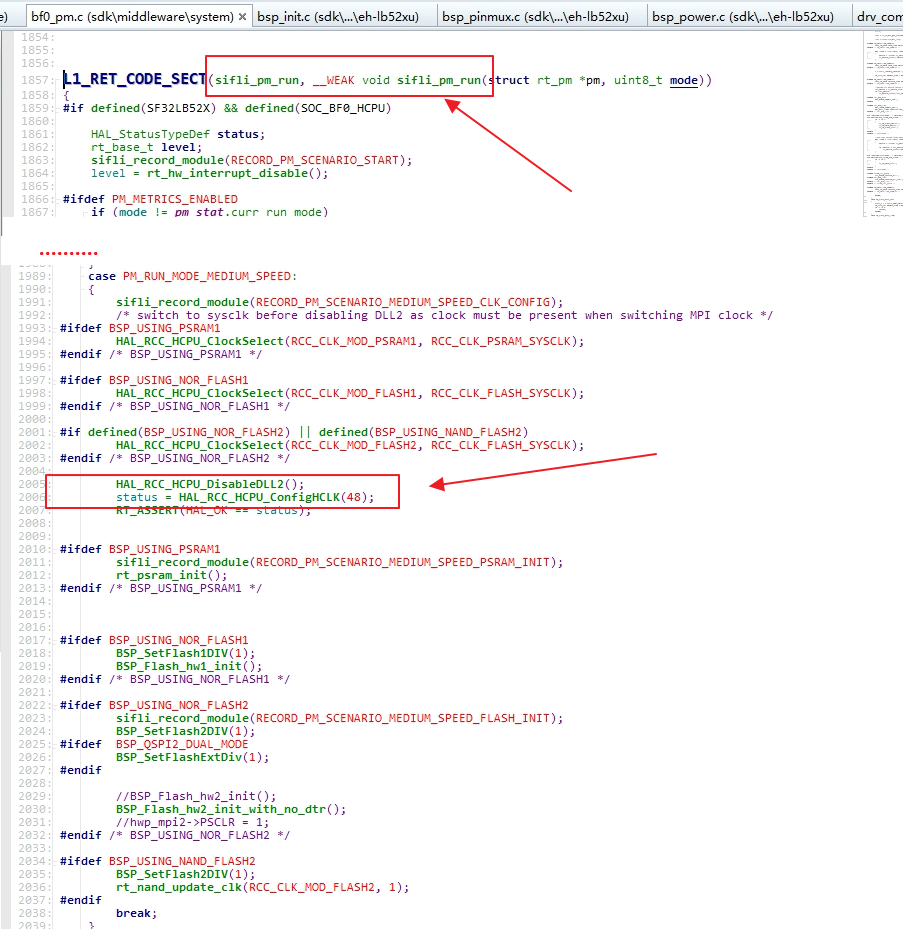
4.1.4 Flash 待机的配置¶
待机时需使 Flash 进入睡眠状态,可在BSP_Power_Up()和BSP_Power_Down()中添加如下接口:
Flash 进入睡眠:
#if defined(BSP_USING_NOR_FLASH2)
#ifdef BSP_QSPI2_DUAL_MODE
rt_flash_enable_lock(0);
rt_flash_power_down(0x13000000, 1); // 深度睡眠:双总线Flash B
HAL_Delay_us(50);
#endif
rt_flash_power_down(0x12000000, 1); // 深度睡眠:双总线Flash A
HAL_Delay_us(50);
#endif
Flash 退出睡眠:
#if defined(BSP_USING_NOR_FLASH2)
rt_flash_power_down(0x12000000, 0); // 退出睡眠:双总线Flash A
HAL_Delay_us(50);
#ifdef BSP_QSPI2_DUAL_MODE
rt_flash_power_down(0x13000000, 0); // 退出睡眠:双总线Flash B
HAL_Delay_us(50);
rt_flash_enable_lock(1);
#endif
#endif
4.1.5 PSRAM 待机的配置¶
待机时需使 PSRAM 进入半睡眠(half-sleep)状态,可在BSP_Power_Up()和BSP_Power_Down()中添加如下接口:
PSRAM 进入半睡眠:
#if defined(BSP_USING_PSRAM1)
rt_psram_enter_low_power("psram1");
#endif
PSRAM 退出半睡眠:
#if defined(BSP_USING_PSRAM1)
rt_psram_exit_low_power("psram1");
#endif
4.2 Sensor 待机功耗优化(核心场景)¶
sensor 读取数据和算法处理会周期性的运行,从功耗优化的角度,从以下两个方面着手:
选择合适的通信接口:接口功耗低且读取sensor数据的时间短;
优化处理时间,以便尽快进入睡眠
4.2.1 通信接口选择¶
一般来讲,MCU与sensor器件接口主要包括以下几种:
通信接口 |
速度(Hz) |
优势 |
劣势 |
优化措施 |
|---|---|---|---|---|
I2C |
- 100k |
引脚少(2 线), 支持多设备 |
速度最慢 |
|
SPI |
- 2M |
速度最快 |
引脚多(4/6 线) |
|
UART |
- 1M |
引脚少(2 线), 速度适中 |
无时钟信号, 需波特率匹配 |
|
4.2.2 算法存储位置调整¶
代码和数据存放的位置决定了算法处理的时间,访问速度SRAM > PSRAM > Flash。因此在RAM够用的情况下,尽可能的把访问频繁的code以及data放在ram中,将提高运行效率。
注意: Solution 2.0中,所有工程都开启了PSRAM Write Back,因此写PSRAM的效率和SRAM相差不大。但建议算法线程的栈一定要放在SRAM中,避免PSRAM cache访问命不中造成的换入换出。
以下是传感器代码与数据的存储位置配置示例:
4.2.2.1 示例1:将Sensor代码(RO段)放入PSRAM¶
用途:
通过脚本配置,将传感器相关代码(如驱动、算法逻辑等只读代码段)存储到PSRAM,优化运行效率。
配置脚本:
// RW_PSRAM_RET:PSRAM存储区域(ZI数据段,非缓存,保留)
RW_PSRAM_RET PSRAM_DATA_START_ADDR {
ido_algo*.o (+RO) // 所有以ido_algo开头的.c文件生成的代码(RO段)
sdrv*.o (+RO) // 所有以sdrv开头的.c文件生成的代码(RO段)
*.o (sys_timer_handle) // 所有包含sys_timer_handle符号的.c文件代码(RO段)
*.o (ido_algo_activity_result) // 所有包含ido_algo_activity_result符号的.c文件代码(RO段)
*ido_alg_m33_V1_0_42*lib (+RO) // 所有包含ido_alg_m33_V1_0_42的库文件代码(RO段)
app_sensor_thread.o (+RO) // app_sensor_thread.c文件生成的代码(RO段)
*gsensor*.o (+RO) // 所有包含gsensor的.c文件生成的代码(RO段)
}
脚本含义:
利用通配符*匹配相关文件 / 符号,批量将传感器相关代码(RO 段,只读代码)存入 PSRAM;
(+RO)表示指定存储代码段(Read-Only,只读数据 / 指令)。
4.2.2.2 示例2:将 Sensor 数据(RW/ZI 段)放入 SRAM¶
用途:
将传感器相关数据(已赋值变量、未赋值变量)存储到 SRAM,提升数据读写速度。
配置脚本:
// RW_IRAM_RET:SRAM存储区域
RW_IRAM_RET +0 {
*ido_alg_m33_V1_0_42*lib (+RW +ZI) // 包含ido_alg_m33_V1_0_42的库中,已赋值变量(RW)和未赋值变量(ZI)
ido_algo*.o (+RW +ZI) // 所有以ido_algo开头的.c文件中,已赋值变量(RW)和未赋值变量(ZI)
}
脚本含义:
(+RW):指定存储已初始化且赋值的变量(Read-Write,读写数据);
(+RW +ZI):同时存储已赋值变量(RW)和未赋值变量(ZI,Zero-Initialized,初始化为 0 的变量);
通过通配符批量匹配传感器相关数据,存入 SRAM 以提高访问效率。
4.2.3 睡眠唤醒优化¶
唤醒时机:按 Sensor 采样周期唤醒(如心率 1 次/分钟,Gsensor 5 次/秒),避免频繁唤醒;
唤醒后处理:快速完成数据采集与算法计算,立即返回低功耗模式,减少唤醒时长。
4.3 待机功耗拆解方法¶
拆解方法 |
操作步骤 |
适用场景 |
示例(以“总待机功耗 100μA”为例) |
|---|---|---|---|
加法拆解 |
|
新系统 |
最简功耗 30μA |
减法拆解 |
|
现有系统 |
全功能 100μA |
4.4 辅助工具:功耗拆解命令¶
通过命令单独启用/禁用功能,便于精准测量:
启用计步:
sensor enable step禁用心率:
sensor disable hr查看功能状态:
sensor status all
5. 关机低功耗分析与配置¶
5.1 关机模式与参考功耗¶
平台 |
关机模式 |
参考功耗(μA@3.8V) |
核心特性 |
|---|---|---|---|
56x |
Standby |
HDK561:10.76 |
关闭外设供电,HCPU/LCPU 均进入 Standby |
52x |
Hibernate |
HDK521:2.34 |
仅保留唤醒电路,IO 高阻(唤醒源除外) |
58x |
Hibernate |
em_587_nor A1: 2.2 |
5.2 Standby / Hibernate配置¶
在 menuconfig 中启用“Standby 关机”:
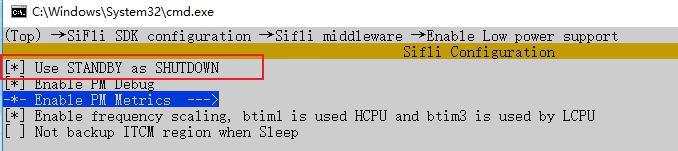
选中时,表示standby关机;没选中,表示Hibernate关机。
5.3 Standby 关机优化.¶
5.3.1 Standby 关机功耗分析¶
以HDK56x 平台为例。
5.3.1.1 基础机制¶
HDK56x 进入 Standby 关机时,HCPU 与 LCPU 需协同进入低功耗状态:
HCPU:关闭 PSRAM、Flash、LCD、TP 等外设供电,关闭大部分唤醒源,核心休眠;
LCPU:关闭传感器、蓝牙等外设,尽可能切断外设供电。
5.3.1.2 常见问题及解决方案¶
问题1:LCPU 进入 Standby 失败,整机漏电 ~1mA¶
核心原因:大核(HCPU)与小核(LCPU)通过 data_service 传输的数据未接收完毕。
解决措施:
通过 ipc_queue_check_idle() 确认数据传输状态,未完成时增加等待延时:
HCPU 端调整:
pm_shutdown():
void pm_shutdown(void)
{
#ifdef BSP_PM_STANDBY_SHUTDOWN
// 省略部分代码
// 关闭所有唤醒源
HAL_HPAON_DisableWakeupSrc(HPAON_WAKEUP_SRC_RTC);
/****************/
rt_thread_mdelay(150); // 数据未传输完成时,增加延时
/****************/
HAL_HPAON_DisableWakeupSrc(HPAON_WAKEUP_SRC_LPTIM1);
HAL_HPAON_DisableWakeupSrc(HPAON_WAKEUP_SRC_LP2HP_IRQ);
MODIFY_REG(hwp_pmuc->LPSYS_SWR, PMUC_LPSYS_SWR_PSW_RET_Msk,
MAKE_REG_VAL(1, PMUC_LPSYS_SWR_PSW_RET_Msk, PMUC_LPSYS_SWR_PSW_RET_Pos));
BSP_Standby_PowerDown();
sys_set_is_power_on(false);
rt_thread_mdelay((RT_TICK_MAX / 2) - 1);
// 省略部分代码
#endif
}
LCPU 端调整:
power_off_standby_cb()
static void power_off_standby_cb(void)
{
rt_kprintf("%s!\n", __func__);
#if defined(BF0_LCPU) || defined(SOC_SF32LB52X)
button_service_mock_in_standby(); // 接管 "btn0" 服务,确保待机状态下按键功能正常
#endif
ipc_send_lcpu_msg_to_hcpu(LCPU_PWR_OFF_RSP, NULL, 0); // 向 HCPU 发送关机响应消息
/****************/
rt_thread_mdelay(300); /* 增加延时,避免 LCPU 端 data service 数据未读取完成 */
/****************/
// 接管 "SENSORS_APP" 服务,确保传感器相关资源在待机前正常释放
datac_handle_t lcpu_service = datac_open();
RT_ASSERT(DATA_CLIENT_INVALID_HANDLE != lcpu_service); // 断言检查服务句柄有效性
datac_subscribe(lcpu_service, "SENSORS_APP", standby_service_cb, 0);
// 省略部分代码(如其他外设资源释放、待机状态确认等逻辑)
}
问题2:睡眠模式请求/释放未配对,导致睡眠失败¶
核心原因:
rt_pm_request(PM_SLEEP_MODE_IDLE)(申请IDLE睡眠模式)与rt_pm_release(PM_SLEEP_MODE_IDLE)(释放IDLE睡眠模式)未成对调用,导致系统睡眠状态计数器异常,无法正常触发Standby关机。
分析方法:
通过打印全局变量__pm.modes[PM_SLEEP_IDLE]的值进行判断:若该值 大于 0:说明存在未释放的
rt_pm_request调用(即申请次数多于释放次数),需在对应业务逻辑中补充rt_pm_release接口,确保“申请-释放”次数完全匹配。示例场景:若在传感器初始化时调用
rt_pm_request禁止睡眠,需在传感器销毁时调用rt_pm_release恢复睡眠权限,否则会导致睡眠模式被持续占用。
问题3:关机功耗高于参考值¶
核心原因:
外设掉电后IO配置未及时更新,仍维持可能产生漏电的状态(如器件已断电,但IO仍配置为上拉),符合前文提到的“漏电模型1”或“漏电模型2”。
排查与解决方向:
重点关注外设:Flash、PSRAM、心率传感器、加速度计等与IO强关联的器件;
配置检查逻辑:在
BSP_Standby_PowerDown()或类似关机准备函数中,增加外设掉电后的IO配置更新代码:示例:若心率传感器掉电,需将其复位IO(reset pin)从“上拉”改为“高阻”或“下拉”,避免悬空或冲突电平;
验证方法:通过万用表测量关键IO的电平状态,确认外设掉电后IO无持续电流通路。
5.3.2 Hibernate 关机功耗分析¶
5.3.2.1 Hibernate 模式下的 IO 状态¶
普通 IO(无唤醒功能):
进入Hibernate后自动切换为高阻态,内部无漏电通路,对外呈现高阻特性(无需额外配置);唤醒 IO(带唤醒功能):
额外集成唤醒输入电路,需通过“内部PMU上下拉”或“外部上下拉电阻”固定电平——若电平悬空,会触发“漏电模型3”(IO电平在0~VDDIO间波动,导致NMOS/PMOS半导通漏电)。
5.3.2.2 不同平台唤醒 IO 漏电分析及配置¶
(1)55X 平台¶
关键特性:
Hibernate关机后,pinmux模块的上下拉配置会掉电失效,且唤醒IO无内置PMU上下拉电路,完全依赖外部硬件设计;漏电风险:
若唤醒IO外部悬空,漏电电流约 0~200uA(因电路板寄生参数差异波动);解决方案:
在硬件设计阶段,为唤醒IO增加外部上下拉电阻(建议10kΩ~100kΩ),软件无需额外配置(仅需确保Hibernate前IO电平与外部电阻匹配)。
(2)52X 平台¶
关键特性:
Hibernate关机后,pinmux上下拉掉电,但唤醒IO(如PA28~PA44)带可配置的不掉电PMU上下拉,可通过寄存器单独控制;
情况1:PMU上下拉未配置/外部电平不确定¶
漏电风险:
PMU上下拉默认未使能,唤醒IO悬空,符合“漏电模型3”,漏电约0~200uA;正确配置
(在pm_shutdown()函数中补充):// 配置PA28~PA44唤醒IO:使能上下拉 + 设为下拉(避免悬空) hwp_rtc->PAWK1R = 0x0001ffff; // PA28~PA44上下拉使能(bit0=PA28,bit1=PA29...) hwp_rtc->PAWK2R = 0x0000; // 所有唤醒IO设为下拉(0=下拉,1=上拉)
情况2:PMU 上下拉与外部电平冲突¶
核心问题:
PMU 上下拉配置方向与唤醒 IO 外部实际电平相反,形成持续漏电路径,符合前文“漏电模型2”(低电平与上拉冲突或高电平与下拉冲突)。错误示例:
若唤醒 IO PA24 外部硬件设计为固定低电平(如接GND),但软件配置为 PMU 内部上拉,会导致电流通过上拉电阻流向外部低电平,产生持续漏电:// 错误配置:PMU内部上拉与外部低电平冲突 HAL_PIN_Set(PAD_PA24, GPIO_A24, PIN_PULLUP, 1);
原因分析:
上拉配置使 IO 引脚维持高电平趋势,而外部低电平强制拉低引脚,两者形成电压差(差值约等于系统供电电压,如3.3V)。根据欧姆定律,该电压差会驱动电流持续流过 PMU 内部上拉电阻,形成固定漏电路径——即使系统进入 Hibernate 模式,该电流仍会存在,导致关机功耗高于参考值。
解决方案:遵循“配置与外部电平匹配”原则,分两步操作:
硬件电平确认:
通过原理图或万用表测量,明确唤醒 IO 外部实际电平(如接 GND 为低电平、接 VCC 为高电平、接其他模块为动态电平需额外评估);
软件配置调整:根据外部电平修改 PMU 上下拉参数,避免电压差产生:
若外部为 低电平(如接 GND):将 IO 配置为“PMU 下拉”或“高阻态”,禁止上拉;
若外部为 高电平(如接 VCC):将 IO 配置为“PMU 上拉”或“高阻态”,禁止下拉;
若外部为 动态电平(如接传感器输出):需在进入 Hibernate 前,确保外部模块已掉电或输出固定电平,再匹配 IO 配置。
正确配置示例(外部低电平场景):
若唤醒 IO PA24 外部接 GND(低电平),需将 PMU 配置改为下拉,代码如下:// 正确配置:外部低电平时,启用 PMU 下拉,避免电压差 HAL_PIN_Set(PAD_PA24, GPIO_A24, PIN_PULLDOWN, 1);
验证方法:
配置完成后,进入 Hibernate 模式,用万用表测量唤醒 IO 引脚电流 —— 若电流接近 0(或小于 1uA),说明漏电路径已消除;若仍有明显电流,需重新检查外部电平与软件配置的匹配性。
6. 总结¶
低功耗优化的核心是 “精准定位 + 针对性配置”:
工具选型:移动场景用 PPK2,实验室用 34465A/EMK850x;
漏电规避:按 3 种模型检查 IO 配置,重点关注唤醒源 IO;
待机优化:基础配置降频 / 选时钟,Sensor 优化通信 / 存储 / 唤醒;
关机优化:56x 关注 Standby 数据同步,52x 关注唤醒 IO 上下拉。
通过以上方法,可将系统功耗控制在参考范围内,满足低功耗产品需求。