Debugging and Logging
1. Hardware Interface
The SF32FB55X uses SWD as the debugging interface. Users can configure it to switch between HCPU or LCPU.
By default, the system powers up with HCPU. If you need to debug LCPU, you can use the SDK tool $SDK_ROOT/tools/segger/jlink_lcpu_a0.bat to switch the SWD to LCPU.
Similarly, if SWD is currently connected to LCPU, you can use the SDK tool $SDK_ROOT/tools/segger/jlink_hcpu_a0.bat to switch the SWD back to HCPU.
Note
Since SWD uses PB IO, when debugging with SWD, make sure that LPSYS is in active or light sleep mode, whether the SWD is connected to HCPU or LCPU.
Sending a reset command from JLink will not change the current CPU connected via SWD.
After LPSYS wakes up from standby, SWD will automatically switch back to HCPU.
LCPU Log Interface
The system ROM, during initialization, uses UART3 of LCPU as the console interface with a baud rate of 1,000,000 bps for logging and command input. It is recommended to retain this interface for LCPU logs.
HCPU Log Interface
The HCPU log interface can be selected between UART1/2 or SWD. If you need to use UART3/4/5 of LCPU, ensure that the LCPU is in an active state.
2. Debugging Methods
This section covers common methods for analyzing Assert or HardFault errors and solving system crashes. The JLink debugger is used for all methods.
Setting Breakpoints
When JLink connects to HCPU/LCPU, the system is usually already initialized. If you need to debug initialization processes, such as cold starts or standby wake-ups, you need to halt the system as early as possible.
We suggest users modify the system initialization code:
HCPU
$SDK_ROOT/drivers/cmsis/sf32lb55x/Templates/arm/startup_bf0_hcpu.SLCPU
$SDK_ROOT/drivers/cmsis/sf32lb55x/Templates/arm/startup_bf0_lcpu.S
In the Reset_Handler, uncomment the first instruction ; to change it to:
B .
This will halt the CPU at the first instruction. Once JLink is connected, you can adjust the PC register (+2) and set breakpoints to debug the initialization process.
This method can also be used at other points to halt the system at a specific event and debug at the suspected location. In C files, you can add:
_asm(“B .”);
This will stop the system at that instruction. Then, reconnect JLink, adjust the PC register (+2), and continue debugging.
Note
Do not use while(1); because the system will optimize it and make the statements after while(1) ineffective.
Assert/HardFault Error Analysis
When an error occurs, if the development board is connected via SWD to JLink, you can use the tool $SDK_ROOT/tools/crash_dump_analyser/script/save_ram_a0.bat to save RAM, EPIC registers, and PSRAM content to the current path. This is helpful for analyzing the cause of the crash.
Note
Make sure to add the JLink path to your Windows PATH environment variable, e.g., C:/Program Files (x86)/SEGGER/JLink_v672b, so you can load RAM via JLink to restore the crash context.
Analyzing Logs
By default, the SDK will output the breakpoint line and the last CPU registers during an Assert to the log interface. Analyze the contents of the log. Note that if the log interface is asynchronous, it may not output the complete log.
Assertion failed at function:app_exit, line number:704 ,(app_node->next != &running_app_list)
===================
Thread Info
===================
thread pri status sp stack size max used left tick error
-------- --- ------- ---------- ---------- ------ ---------- ---
app_watc 25 ready 0x00000100 0x00002800 26% 0x00000008 000
tshell 20 suspend 0x000000f4 0x00001000 13% 0x00000008 000
ble_app 15 suspend 0x000001b4 0x00000400 54% 0x00000007 000
mbox_th 10 suspend 0x00000110 0x00001000 51% 0x00000006 000
ds_proc 12 suspend 0x0000011c 0x00000800 24% 0x00000005 000
ds_mb 11 suspend 0x00000148 0x00000400 32% 0x0000000a 000
touch_th 10 suspend 0x000000ec 0x00000200 59% 0x00000006 000
test 15 suspend 0x0000011c 0x00000400 27% 0x0000000a 000
alarmsvc 8 suspend 0x00000074 0x00000200 22% 0x00000001 000
ulog_asy 30 ready 0x000000ec 0x00000400 36% 0x0000000b 000
tidle 31 ready 0x00000064 0x00000200 19% 0x00000008 000
timer 4 suspend 0x000000e0 0x00000400 23% 0x00000003 000
main 10 suspend 0x000000ec 0x00000800 31% 0x0000000c 000
===================
Mailbox Info
===================
mailbox entry size suspend thread
-------- ---- ---- --------------
g_bf0_si 0000 0016 0
ble_app 0000 0008 1:ble_app
===================
MessageQueue Info
===================
msgqueue entry suspend thread
-------- ---- --------------
uisrv 0000 0
mq_guiap 0000 0
data_mb_ 0000 1:ds_mb
dserv 0000 1:ds_proc
test 0000 1:test
===================
Mutex Info
===================
mutex owner hold suspend thread
-------- -------- ---- --------------
dserv (NULL) 0000 0
tmalck (NULL) 0000 0
alarmsvc (NULL) 0000 0
alm_mgr (NULL) 0000 0
ulog loc (NULL) 0000 0
i2c_bus_ (NULL) 0000 0
i2c_bus_ (NULL) 0000 0
i2c_bus_ (NULL) 0000 0
i2c_bus_ (NULL) 0000 0
spi1 (NULL) 0000 0
===================
Semaphore Info
===================
semaphore v suspend thread
-------- --- --------------
app_tran 000 0
lv_data 001 0
lv_lcd 001 0
lv_epic 001 0
drv_lcd 000 0
fb_sem 000 0
lvlargef 001 0
lvlarge 001 0
btn 001 0
shrx 000 1:tshell
g_sifli_ 000 0
tma525b 000 1:touch_th
aw_tim 000 0
cons_be 000 0
ulog 150 0
heap 001 0
===================
Memory Info
===================
total memory: 260784 used memory : 69096 maximum allocated memory: 96768
===================
MemoryHeap Info
===================
memheap pool size max used size available size
-------- ---------- ------------- --------------
lvlargef 309172 301588 309124
lvlarge 2473392 2201700 2473344
=====================
sp: 0x2006ec08
psr: 0x60000000
r00: 0x00000000
r01: 0x00000000
r02: 0x200bc8f8
r03: 0x0000002a
r12: 0x10069305
lr: 0x100642e9
pc: 0x10020bfa
=====================
fatal error on thread: app_watc?
Analyzing Crash Context with Ozone
Using Jlink (USB) connection for configuration
If the log analysis cannot pinpoint the crash issue, the Ozone debugging tool provided by Segger can be used. Ozone is easier to attach to the chip via JLink during a crash compared to Keil (as Keil configurations can easily reset the chip and destroy the crash context).
Ozone can also be used in cases where the board is not crashed and can be attached for step-by-step debugging, similar to Keil, although its stack analysis seems to be less effective.
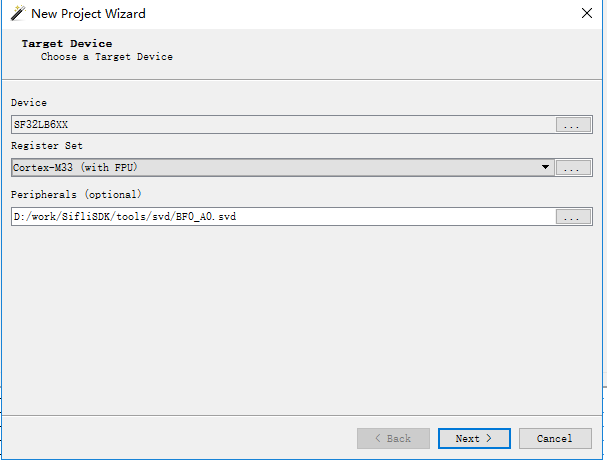
Create a new project, select the appropriate Device driver (Cortex-M33), choose the Register Set as Cortex-M33 (with FPU), and the peripheral SVD file (select based on the chip model, the path is in _$SDK_ROOT/tools/svd_external)
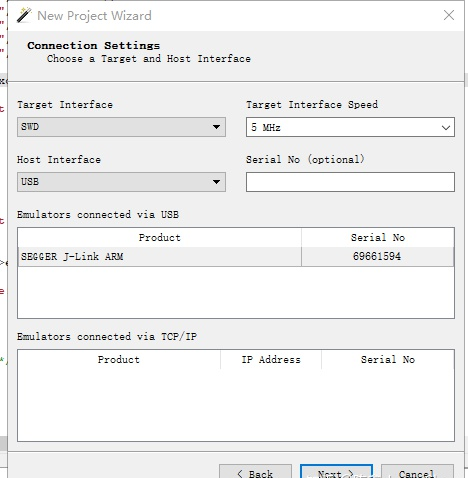
Select the connection method for JLink, using SWD interface.
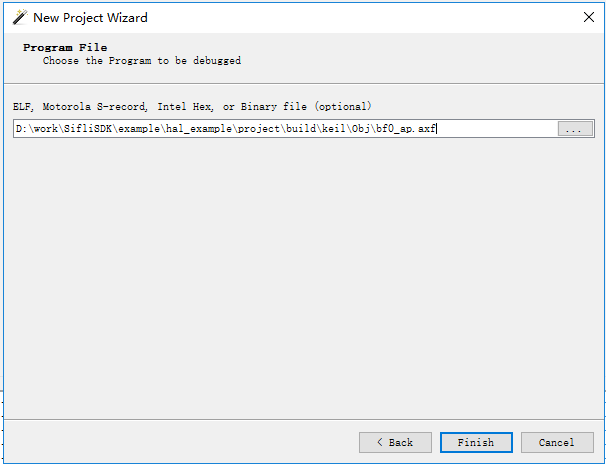
Choose the ELF file for flashing and read the symbol information.
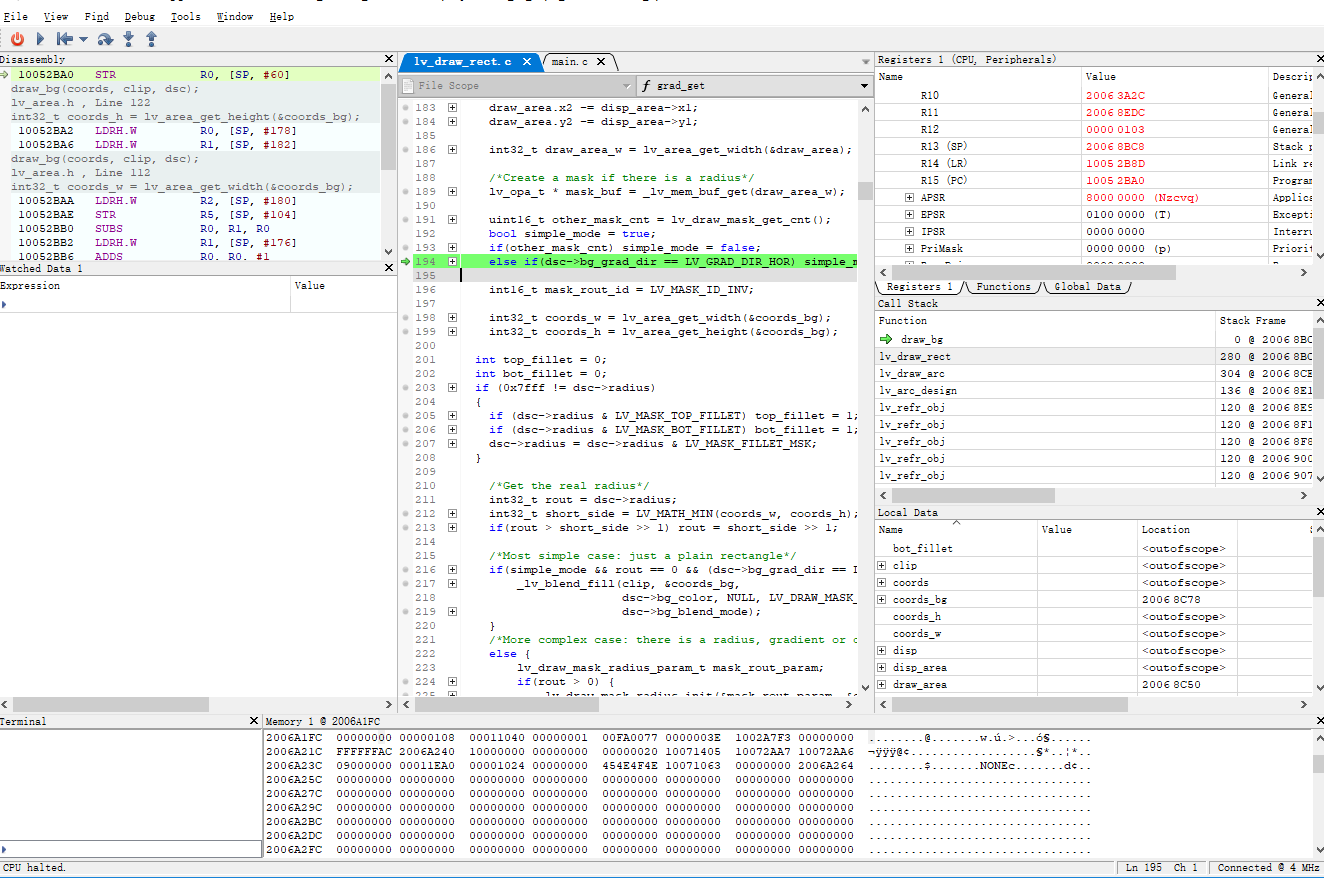
Once the project is set up, attach Ozone to the crashed board via JLink and halt the board.
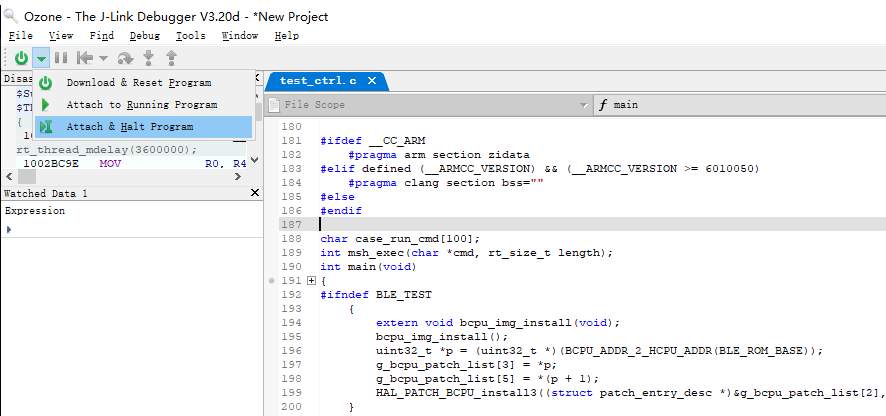
Now you can perform step-by-step debugging, variable inspection, stack analysis, etc., similar to Keil.
Configure using serial port connection method
Create a new project, select the appropriate Device driver (Cortex-M33), choose the Register Set as Cortex-M33 (with FPU), and the peripheral SVD file (select based on the chip model, the path is $_SDK_ROOT/tools/svd_external)
Open SifliUsartServer.exe and click on “Connect”. Pay attention to the selected core for debugging and the corresponding serial port number for that core.
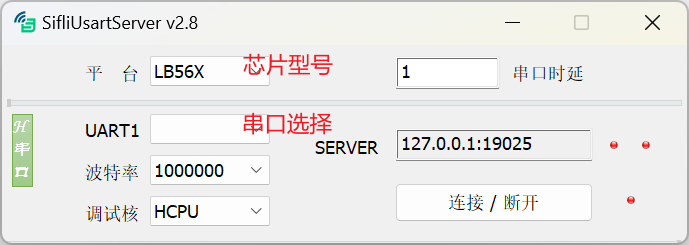
Next, OZone selects the connection method for UART, Host Interface is set to IP, and IP Address is filled with SERVER of UartServer.
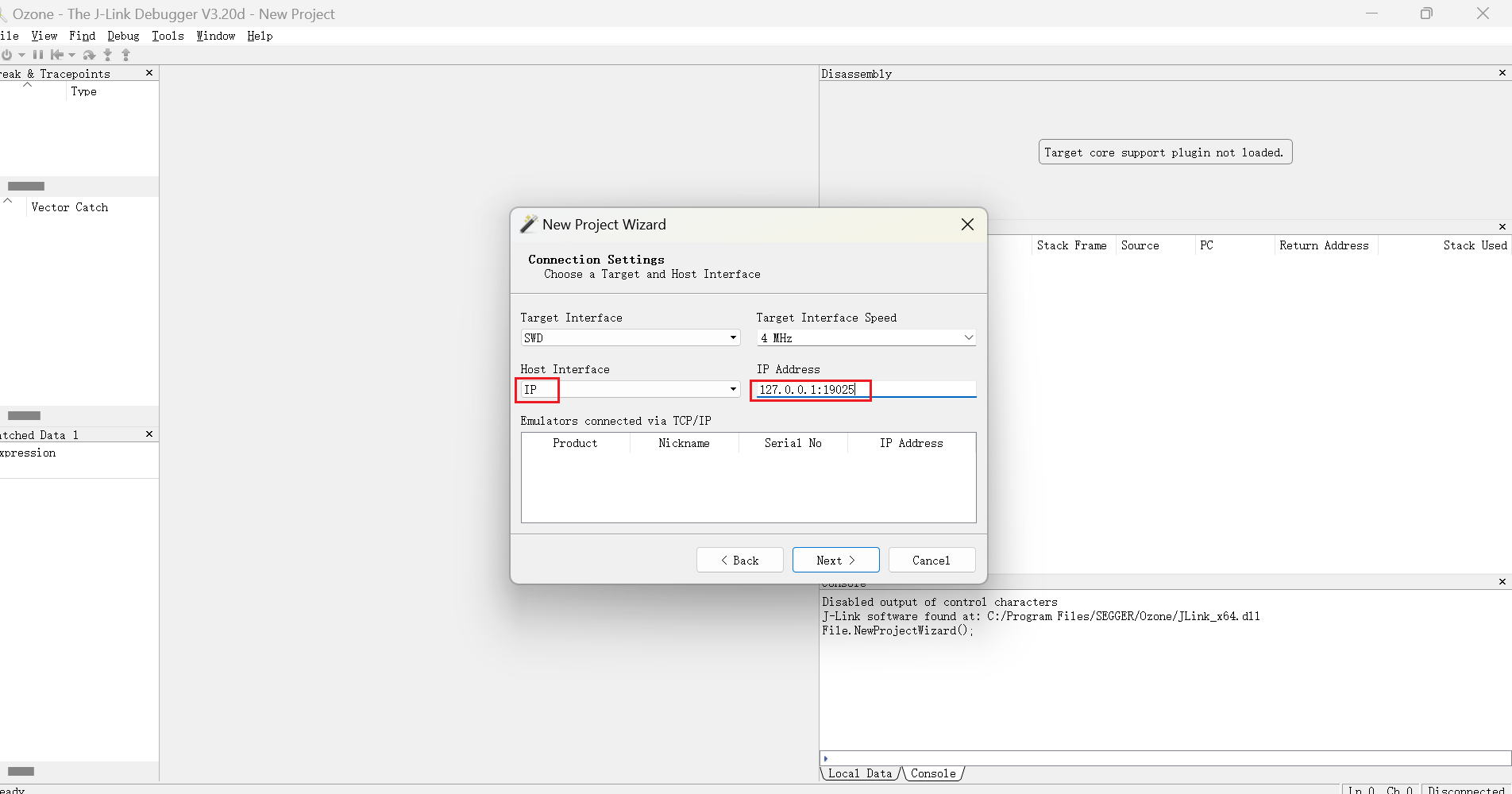
Select the ELF file for the burning program and read the symbol information
3. Log Interface
Logging via UART
The pinmux configuration for UART is not discussed here. Please refer to UART for details.
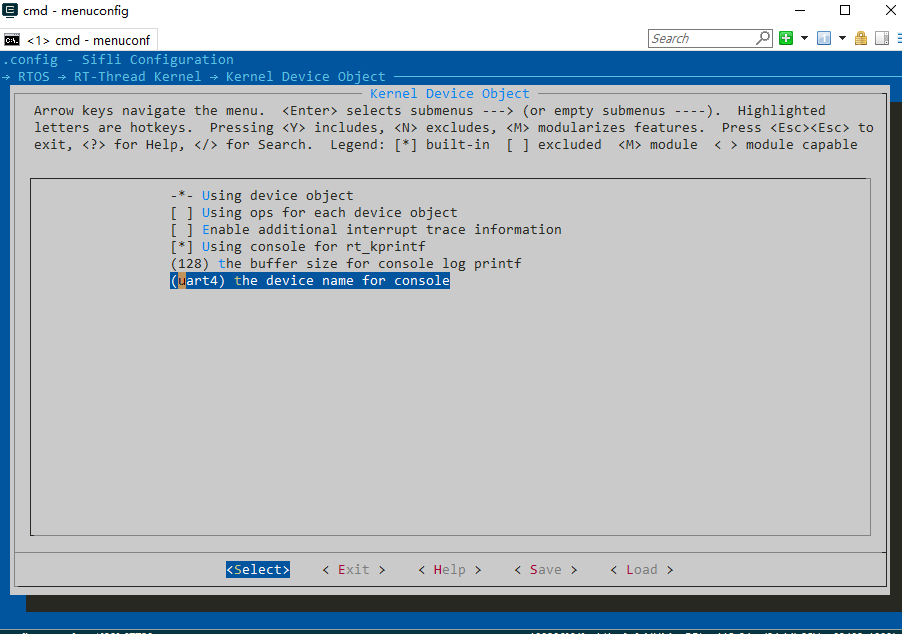
If using RT-Thread RTOS, after configuring the UART pinmux, you can choose different UART devices through the following menuconfig configuration:
Additionally, the SDK uses ULOG as the general logging output interface, detailed in Logger.
Logging via JLink
If there are not enough pins available, you can use JLink’s RTT functionality as a console interface. The configuration steps are as follows (Segger RTT functionality is integrated into the RT-Thread RTOS provided by the SDK):
Enable the Segger RTT functionality through menuconfig (it will automatically register an
rt-devicenamedsegger).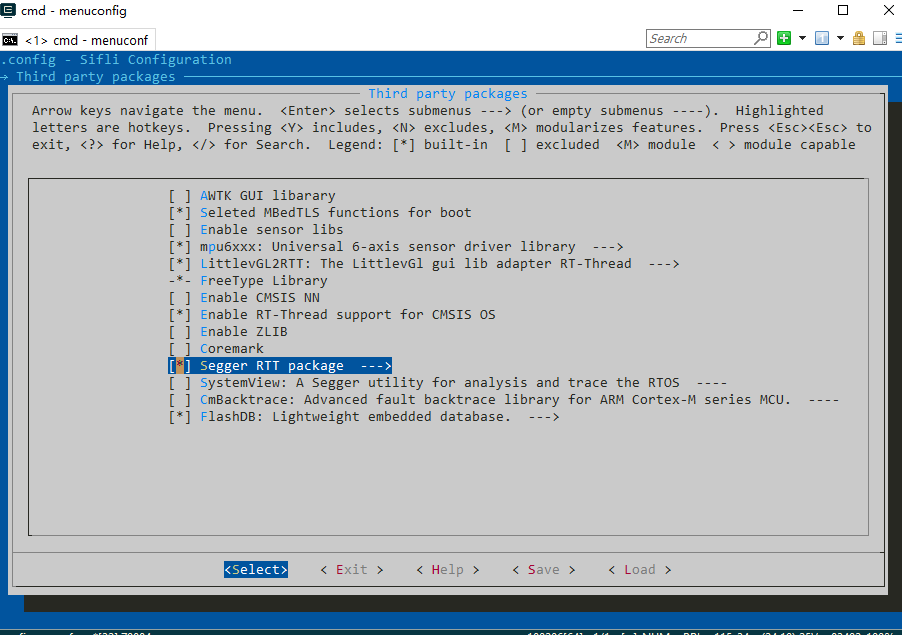
Assign the default console of RT-Thread to the
seggerrt-device.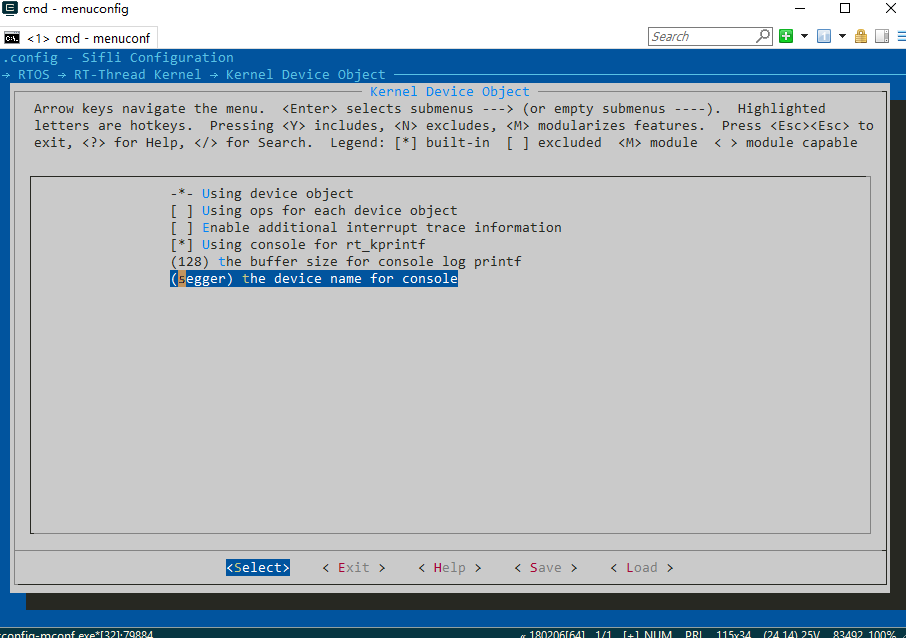
Connect to the board using Ozone. If the ELF file is already specified, Ozone will automatically search for
RTT_Ctrlb. Otherwise, you need to specify it manually.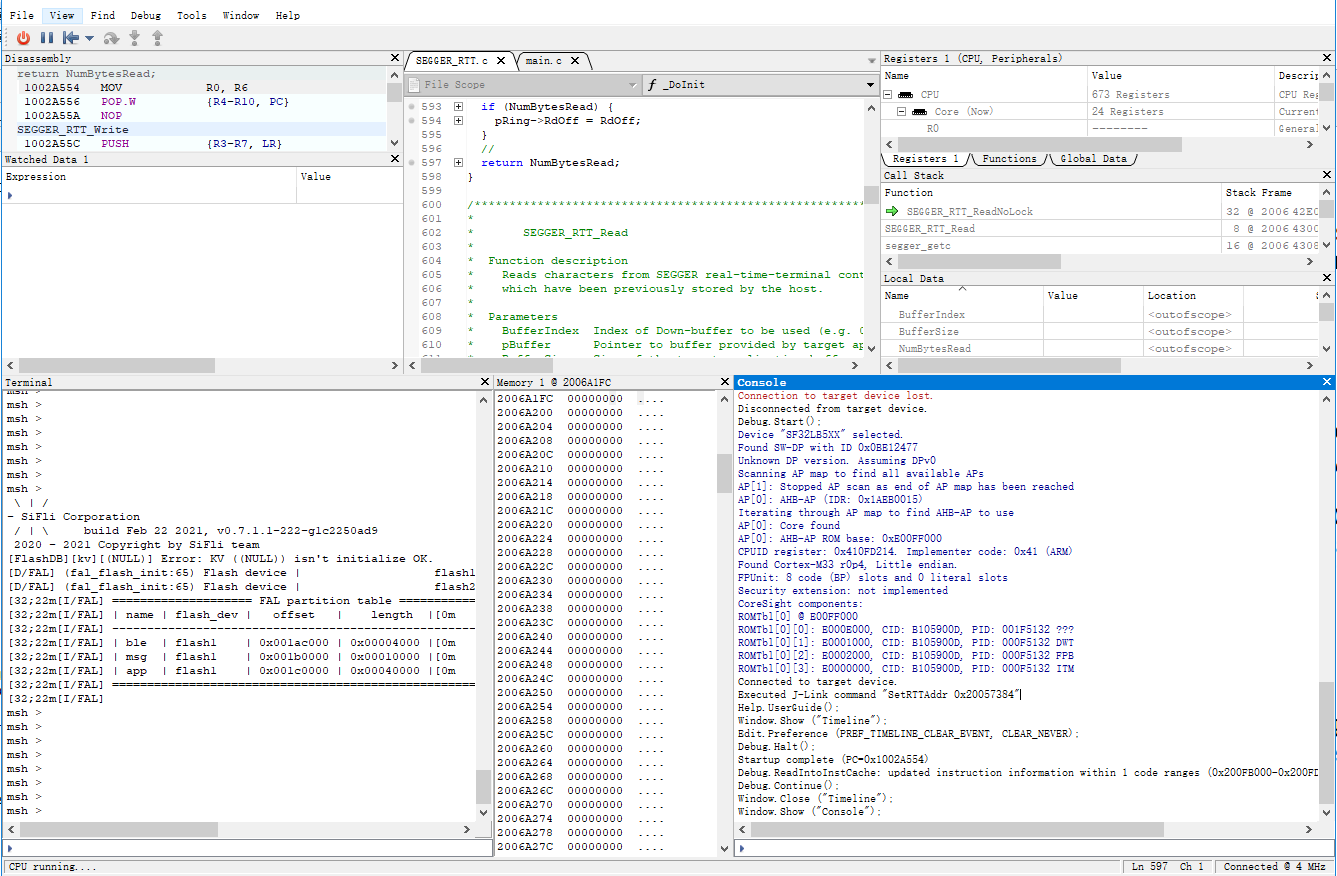
4. Using Bus Monitors
Bus monitors can track access on the bus and trigger interrupts or callbacks when specific conditions are met. This is useful for debugging memory or peripheral device accesses during development.
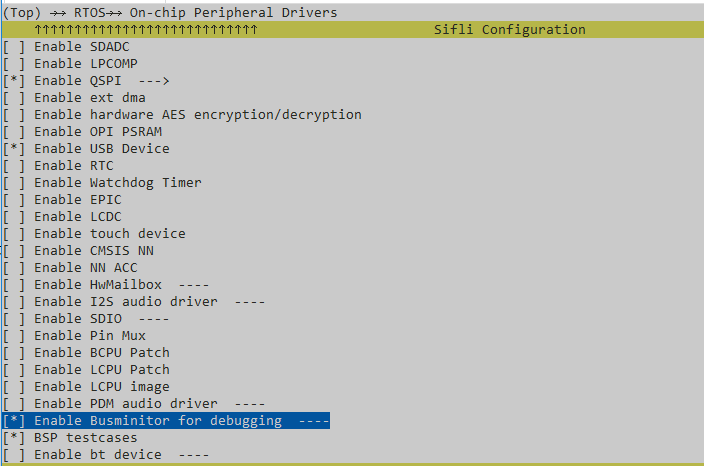
Enabling the Bus Monitor
Enable the bus controller functionality through the following menuconfig configuration:
Using the Bus Monitor
In the code, you can add the following code to implement specific functionality:
void busmon_cbk()
{
rt_kprintf("Busmon captured
"); // Trigger callback when a specific bus access occurs. Users can assert here and further debug.
}
...
dbg_busmon_reg_callback(busmon_cbk); // Register the callback
dbg_busmon_read(0x20080000,1); // Trigger bus monitor on first read of address 0x20080000
// Reconfigure
dbg_busmon_reg_callback(busmon_cbk); // Register the callback
dbg_busmon_write(0x20080004,3); // Trigger bus monitor on third write of address 0x20080004
// Reconfigure
dbg_busmon_reg_callback(busmon_cbk); // Register the callback
dbg_busmon_write(0x20080008,2); // Trigger bus monitor on second read or write of address 0x20080008